



农业一直以来都是人类璀璨文明的基石,同时也跟随现代文明不断向前发展。在科技不断发展的今天,农业又迈入了新的阶段,高新科技不断涌入,采摘机器人便是其中的一员。
在果蔬生产过程中,采摘环节是较为耗时和耗力的环节,人工采摘的成本约占整个生产成本的50%~70%。因此对采摘机器人的研究是十分有必要的。它不但能解决我国劳动力日益短缺的问题,还能促进我国农业科技进步。

在采摘机器人的设计中,有以下这样三个技术难题。
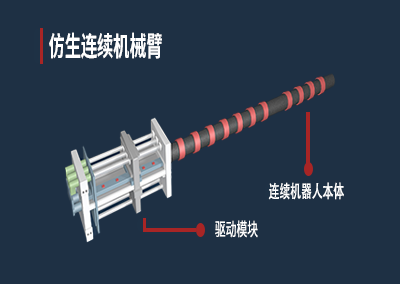
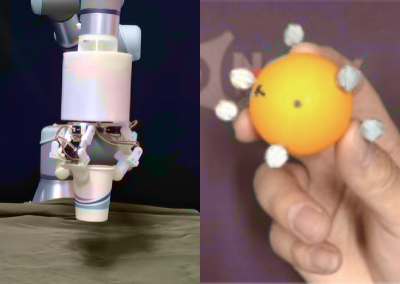
一是怎样导航采摘机器人在果树间快速移动;二是怎样快速识别和定位果树上的果实;三是怎样无损摘取已被识别出的果实。这三个技术难题可以转化为物体的定位问题、无人车的控制问题和机械臂动作控制问题。因为果实表皮脆弱、柔软,不恰当的采摘会使果实表面损坏,从而在随后的贮存运输中造成损失。因此机械臂末端执行器的精准位置控制,对机械臂能稳定抓取果实尤为重要。

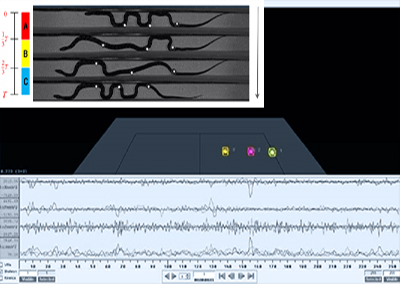
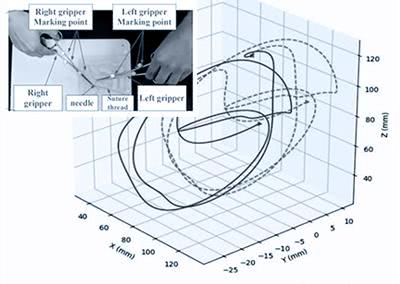
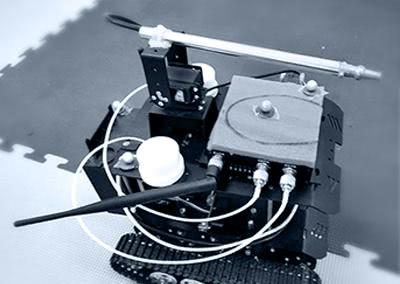
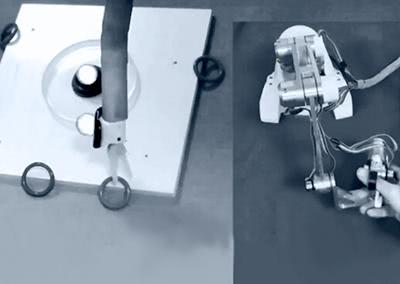
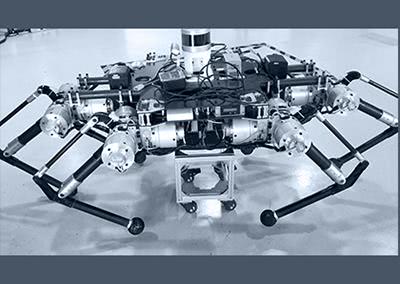
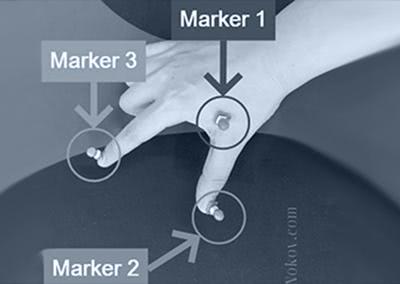
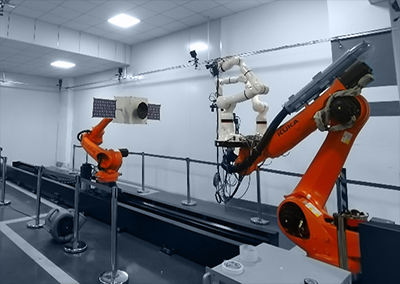
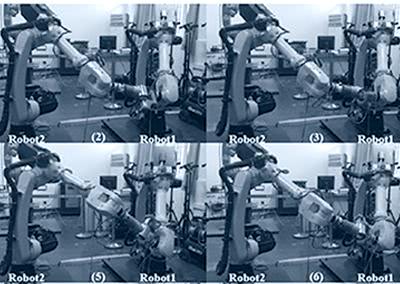
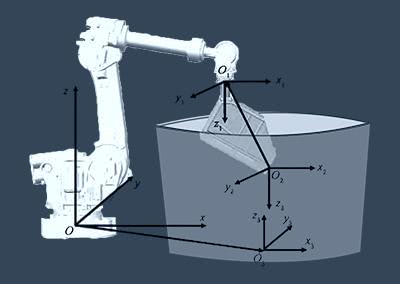
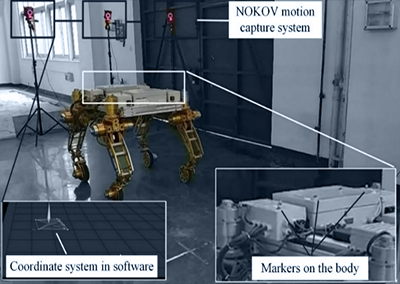
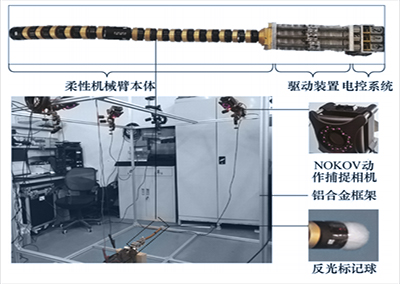
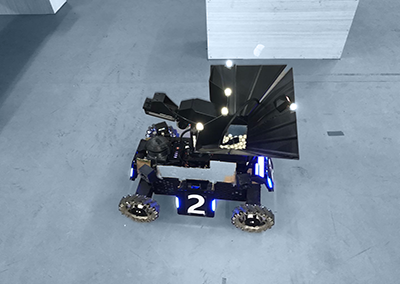
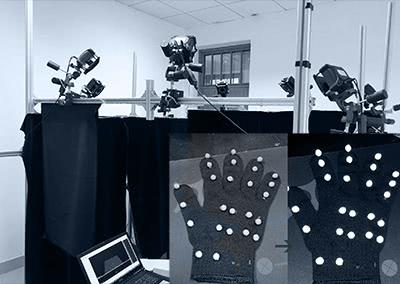
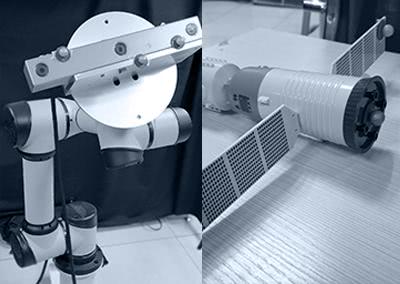
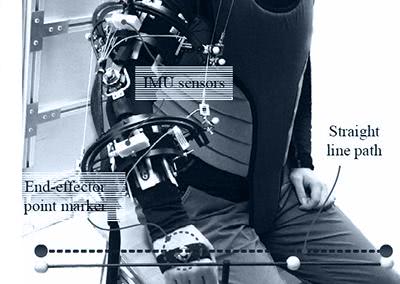
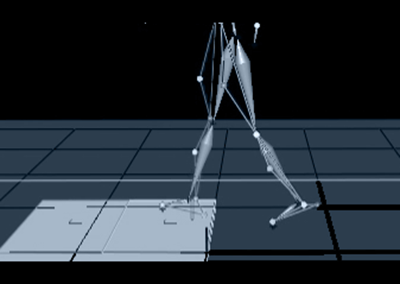
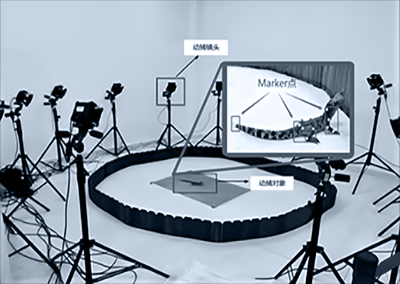
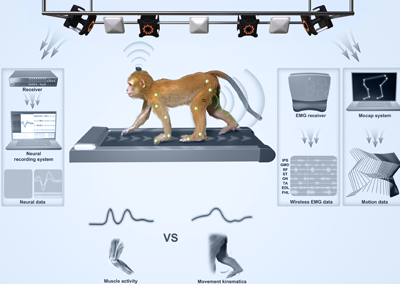
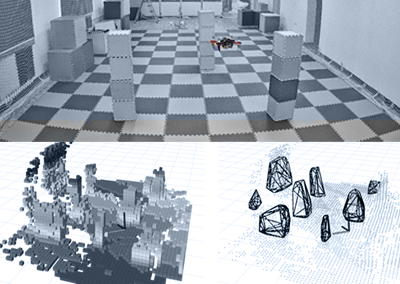
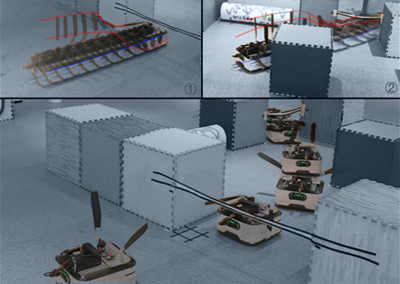
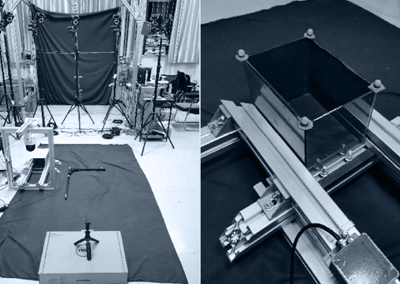
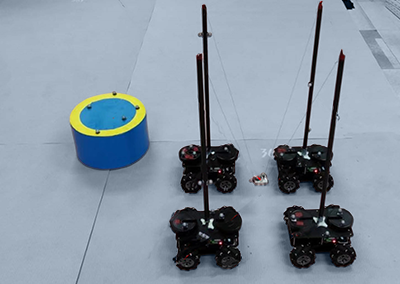
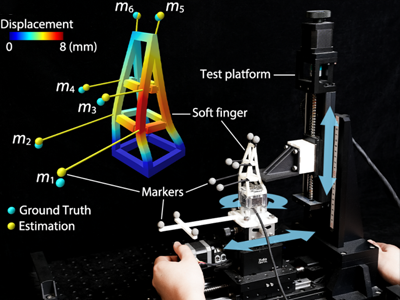
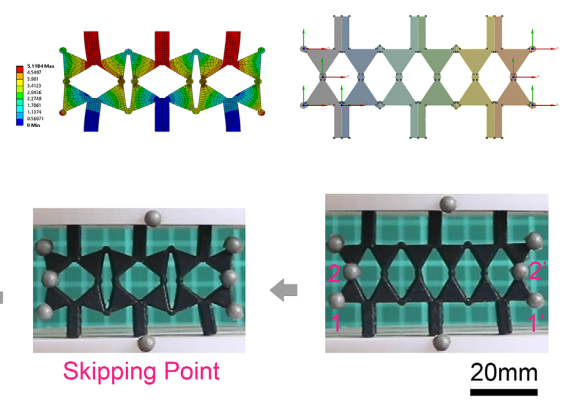
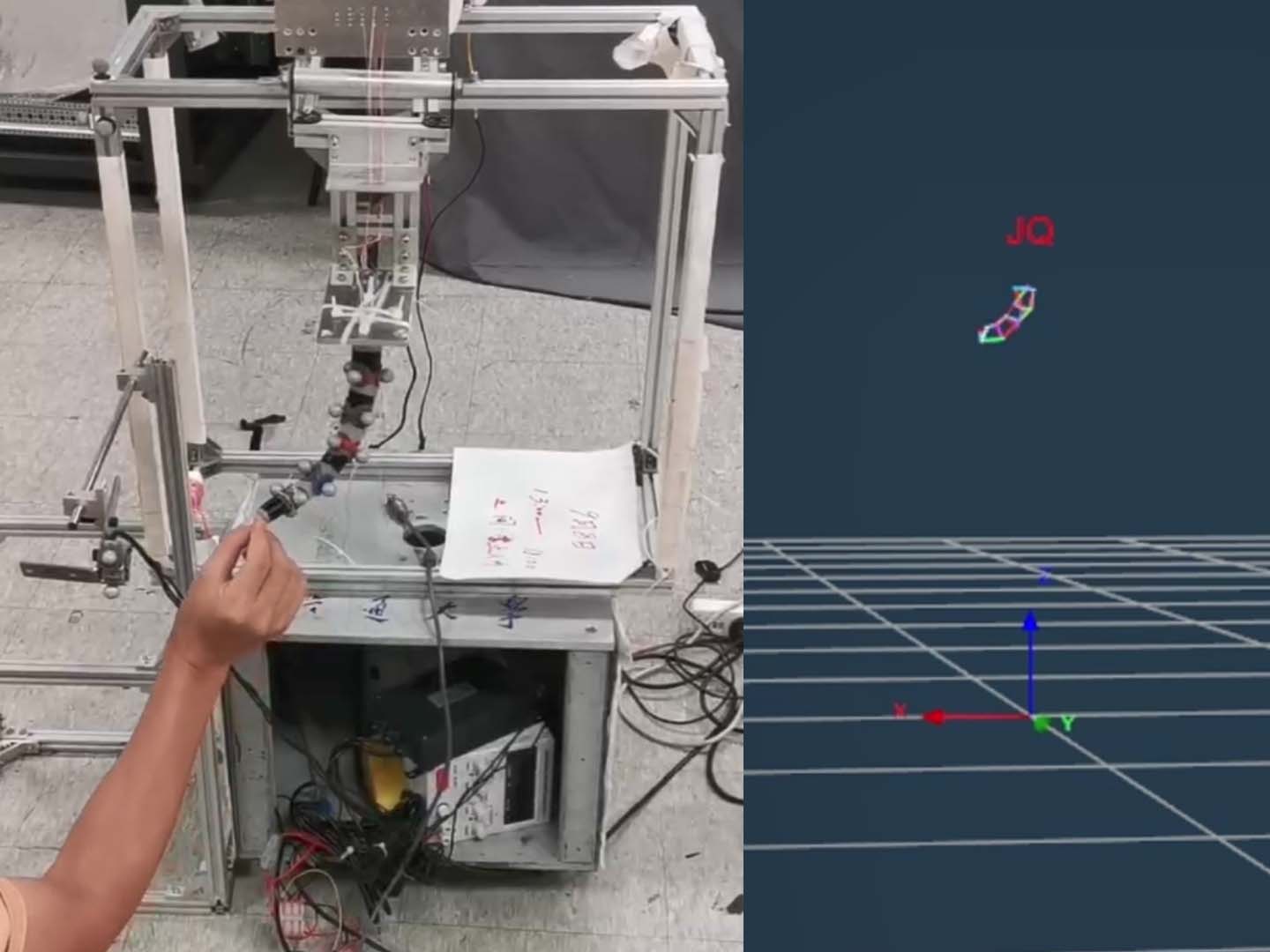
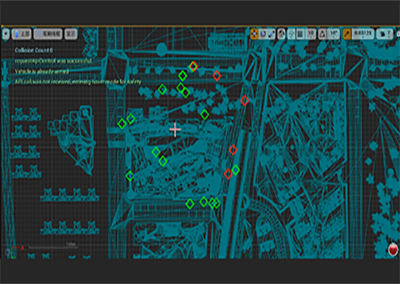
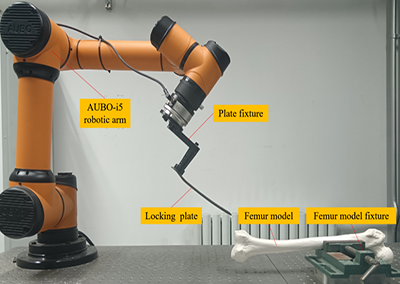
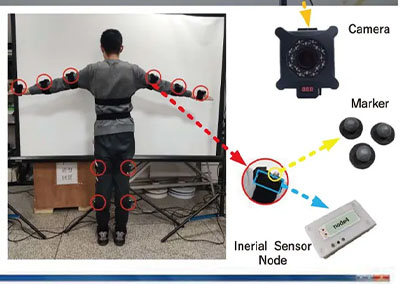
重庆理工大学杨长辉老师实验室的采摘机器人研发团队在研发过程中使用了NOKOV(度量)光学动捕技术,在实验室内搭设了6台Mars 2H镜头,首先通过给采摘机器人机械臂底部的无人车贴上反光标志点(Marker点),获得无人车的精确位置坐标,这些位置坐标作为控制系统的反馈信号,对无人车的行进位置等信息进行纠正,从而实现对无人车的精确控制。随后又对机械臂和果实贴点,捕捉机械臂在与果实进行交互过程中机械臂上点的坐标信息,通过后处理得出机械臂的动作、姿态等信息,尤其是机械臂末端执行器的坐标与姿态,这些信息与果实上点的信息进行比对,数据会被带入一个系统误差评价模型和随机误差评价模型,用于计算机械臂本身定位的误差并进行数据分析。在随机误差存在的情况下,根据数据确定末端构型合适的幅值和相角,从而达到无伤采摘水果的目的。

此外,西北农林科技大学等高校的采摘机器人研发团队,在实验过程中也使用了NOKOV光学动捕技术。





















































更多详情,请留言
-
您可致电010-64922321或在右侧留言,获取您专属的动作捕捉解决方案与报价单
-
- 领域 *
- 提交留言
