



人机共融:外骨骼机器人运动步态拟人化
仿人机器人、共融机器人、生机电一体化穿戴式机器人、双足机器人、类人机器人、随动机器人

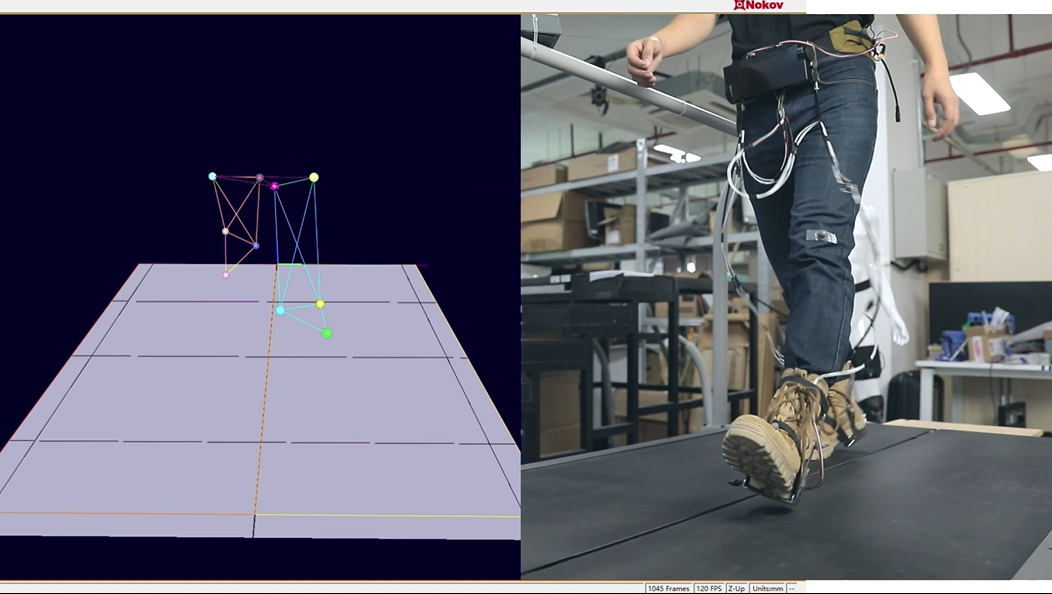
生机电一体化穿戴式机器人
南方科技大学机器人研究院南方科技大学付成龙教授将NOKOV(度量)光学三维动作捕捉系统与三维测力平台、表面肌电仪、足底压力测量仪等 设备同步运行,获取人的六自由度(6DoF)的运动轨迹和运动学参数,进行精确的步态分析,并作为运动规划和位姿 规划的基础数据,解决了相容性问题。
> 点击右侧视频播放/暂停
外骨骼机器人解决方案
• 人体运动学数据获取
采集三维空间XYZ坐标、六自由度(6Dof)、头和躯干、上肢(肩、肘、腕、手)、下肢(髋、膝、踝、足)等 关节角度数据,为机器人的位姿控制、运动规划提供连贯、流畅的动作数据基础。
• 外骨骼机器人运动、步态和位姿的规划与控制
NOKOV(度量)可将捕捉到的人体运动学数据作为机器人的运动、步态和位姿基础数据,对机器人进行动作估计和控制、步态规划和控制、 位姿规划和控制,使其按照预期的运动轨迹执行人类为其设定的动作任务。
• 外骨骼机器人运动规划与控制方法的检验与验证
研究人员可使用NOKOV(度量)光学三维动作捕捉系统采集人的六自由度(6DoF)的运动轨迹和运动学参数,并进行数据转换处理, 从而实现对机器人的运动、步态、位姿的规划和控制。
NOKOV(度量)光学三维动作捕捉系统功能
• 提供人体与六自由度运动轨迹和运动学数据
NOKOV采集的人体运动学数据能够为外骨骼机器人的位姿控制与运动规划提供连贯、流畅的动作数据基础。采集到的外骨骼机器人运动 学数据可作为控制算法验证的真值。
• 亚毫米的定位精度
• 兼容多种生物力学研究设备
NOKOV可与表面肌电仪、三维测力平台、足底压力测量仪等设备同步运行,实时输出运动学和步态数据。
• 丰富的二次开发接口
采集到的数据可以以VRPN形式传输,或通过SDK(C++语言)端口广播与ROS、Labview、Matlab(包含Simulink)等软件通信进行二次开发。
机器人助力系统/共融机器人的研发
南方科技大学南方科技大学基于降低残疾人做行走、负重行走、上下楼梯、站起等复杂动作时的新陈代谢消耗的目的,研发了包含踝 关节和膝关节的机器人化动力大腿假肢。NOKOV(度量)三维动作捕捉系统为其提供了包括研究过程中的髋膝踝等重点 关节角度。
了解更多


MARS系列动作捕捉相机
- • 满足客户全方位需求。分辨率从220万至2600万像素,频率从180Hz至340Hz全面覆盖。
- • 高精度,低延时,专为科学研究领域设计,是目前极具性价比的光学动作捕捉解决方案。
- • 适用型号:Mars 2H,Mars 4H,Mars 26H
