




无人驾驶汽车室内定位追踪
根据现有的技术网络,汽车工业未来的发展方向必然会向智能化、网联化大步迈进,而无人驾驶汽车也必将成为未来汽车工业的主要角色。 无人驾驶在结合城市沙盘环境的研发过程中,可通过NOKOV(度量)光学三维动作捕捉系统实时获取获取无人车的精准位置信息,实现实时 纠正路线与行驶行为。
经典案例
无人驾驶汽车定位追踪-中国汽车技术研究中心
了解更多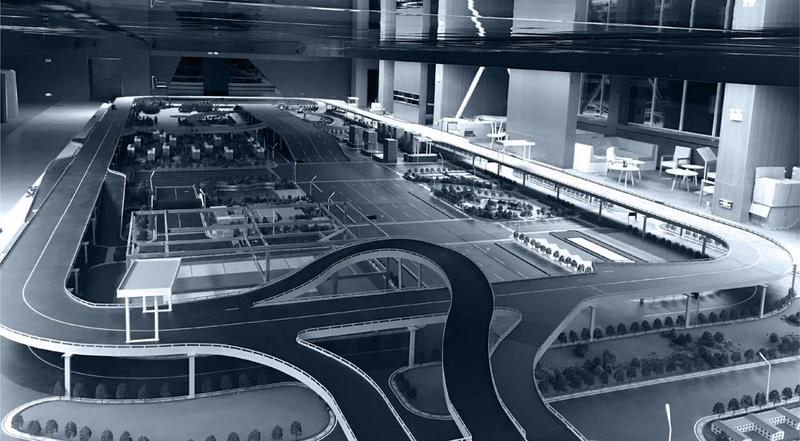
电力巡检
为了提高架设在偏远山区的高架电塔的巡检效率与巡检次数,降低巡检人员的危险,提升电力系统巡检的智能化,开发用于电力巡检的 边云协同电力巡检系统很有必要。边云协同电力巡检系统的建立前提,是需要在实验室环境下完成无人机的路线模拟以及视觉训练,无人 机的模拟路线的训练需要NOKOV(度量)定位系统提供无人机在空中的精确位置数据。
经典案例
边云协同电力自主巡检系统的研发-中国电力科学研究院

光学三维动态测量
NOKOV光学三维运动测量系统可测算,追踪,标记目标点在三维空间中的运动轨迹和姿态,并提供亚毫米级测量精度,广泛应用于汽车碰撞实验中减震材料的性能验证、车门在轨振动变形测量、桥梁变形测量、柔性结构位移非接触测量、低速风洞实验、机翼姿态角测量、房屋振动变形测量。
了解更多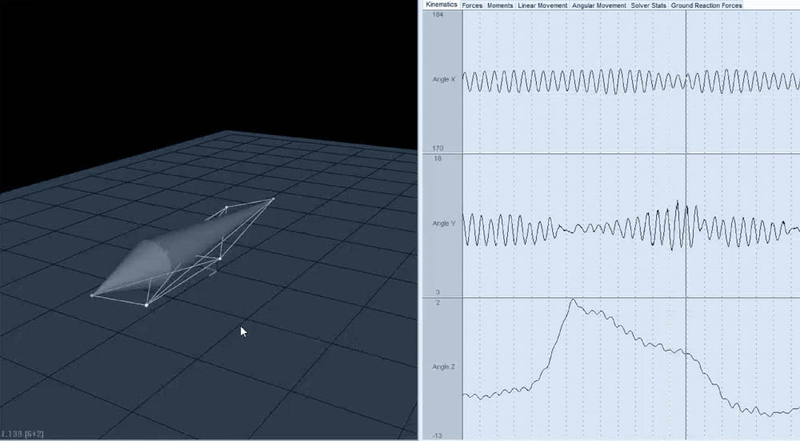
NOKOV(度量)光学三维动作捕捉系统功能
• 六自由度数据采集
采集三维空间XYZ坐标、六自由度(6DoF)、关节角度、偏航角(Yaw)、横摇角(Roll)、俯仰角(Pitch)、欧拉角等数据,为 机器人/无人机的位姿控制、运动规划提供连贯、流畅的动作数据基础。
• 亚毫米的数据精度
• 丰富的二次开发接口
采集到的数据可以以VRPN形式传输,或通过SDK(C++语言)端口广播与ROS、Labview、Matlab(包含Simulink)等软件通信进行二次开发。
• 丰富的二次开发接口,并能以VRPN形式进行传输


推荐方案
MARS系列动作捕捉相机
- • 满足客户全方位需求。分辨率从220万至2600万像素,频率从180Hz至340Hz全面覆盖。
- • 高精度,低延时,专为科学研究领域设计,是目前极具性价比的光学动作捕捉解决方案。
- • 适用型号:Mars 2H,Mars 4H,Mars 26H