采集三维空间XYZ坐标、六自由度(6DoF)、头和躯干、上肢(肩、肘、腕、手)、下肢(髋、膝、踝、足) 等关节角度数据,为仿生机器人的位姿控制、运动规划提供连贯、流畅的动作数据基础。
NOKOV可将运动学数据作为机器人的运动、步态和位姿基础数据,对仿生机器人进行动作估计和控制、步态规划 和控制、位姿规划和控制,使其按照预期的运动轨迹执行人类为其设定的动作任务。
研究者可使用NOKOV(度量)光学三维动作捕捉系统采集仿生机器人的六自由度(6DoF)的运动轨迹和运动学 数据,并进行数据转换处理,从而实现对机器人控制算法的优化。

NOKOV(度量)光学三维动作捕捉可以捕捉人和几乎所有动物的微小动作,从马到狗,从羊到鱼,从啮齿动物到节肢动物,甚至是鸟类和昆虫。
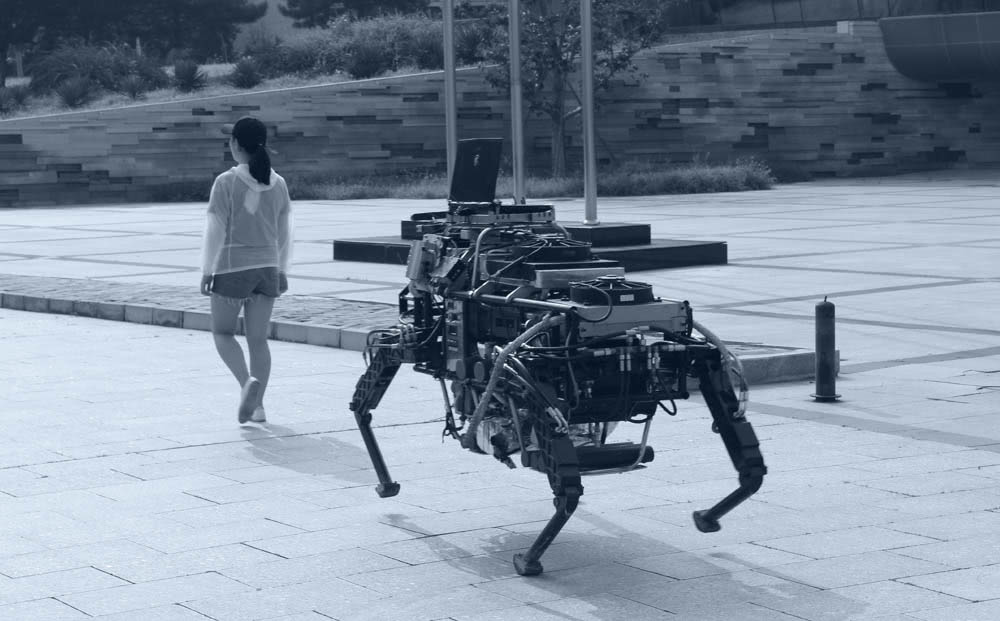
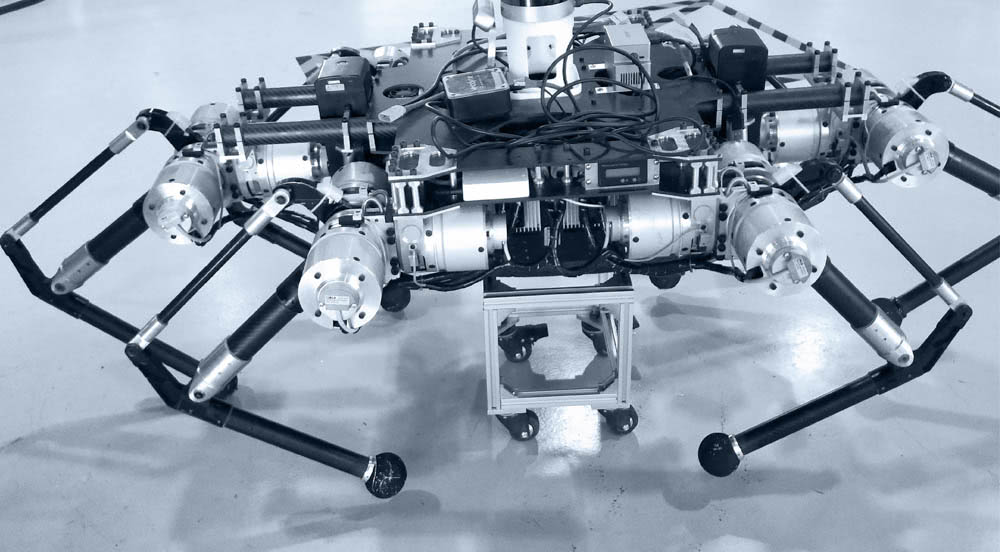
扑翼机器人的两翼、机身的空间位置和姿态的定位捕捉——实现对扑翼机器人两翼扑打频率和模式、以及扑翼带来的机身和机头上下震动模式的研究。 扑翼机器人的定位追踪——大空间内对扑翼机器人进行位置与姿态的追踪。 四足/六足机器人——机器人的关节角度数据的捕捉。
采集到的数据可以以VRPN形式传输,或通过SDK(C++语言)端口广播与ROS、Labview、Matlab(包含Simulink)等软件通信进行二次开发。