



智能采摘机器人的应用在成熟果实收获中有极大作用,其有利于缩短采摘时间、降低采摘成本、减小人工劳动强度,在果实生产作业中有着举足轻重的意义。
现有采摘机器人没有根据果实生长分布情况及遮挡状态进行类别划分,采摘机器人无法准确区分可采摘和遮挡的果实,可能导致采摘失败甚至损伤末端执行器。为此重庆理工大学的杨长辉老师团队研究了自然场景下成熟柑橘果实的分类识别与定位方法,使其具有自主感知和收获能力。

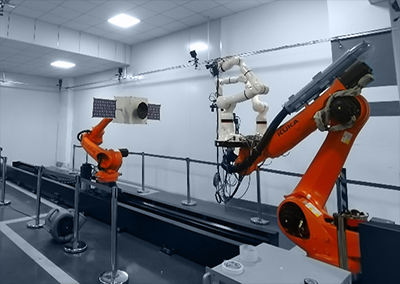
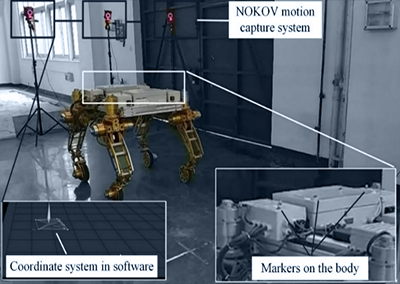
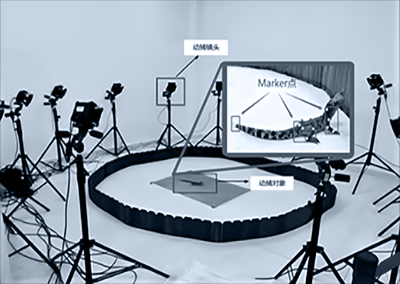
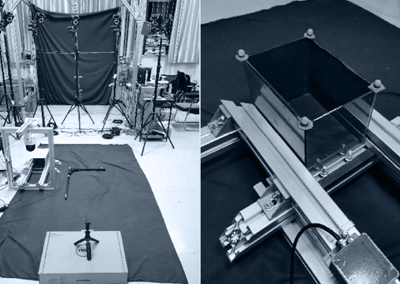
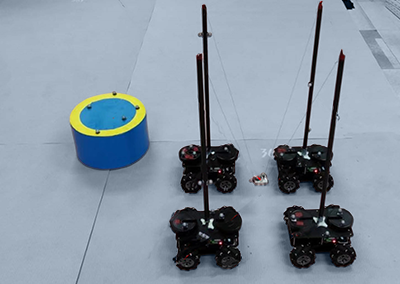
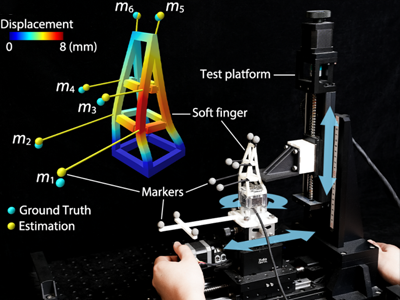
为了验证该果实识别定位方法的可靠性,并准确获取该方法对于果实定位的精度,团队在实验室环境下利用NOKOV度量动作捕捉系统(如图所示)对任意位置的果实进行了定位精度测试。

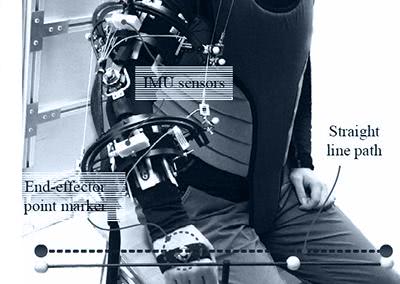
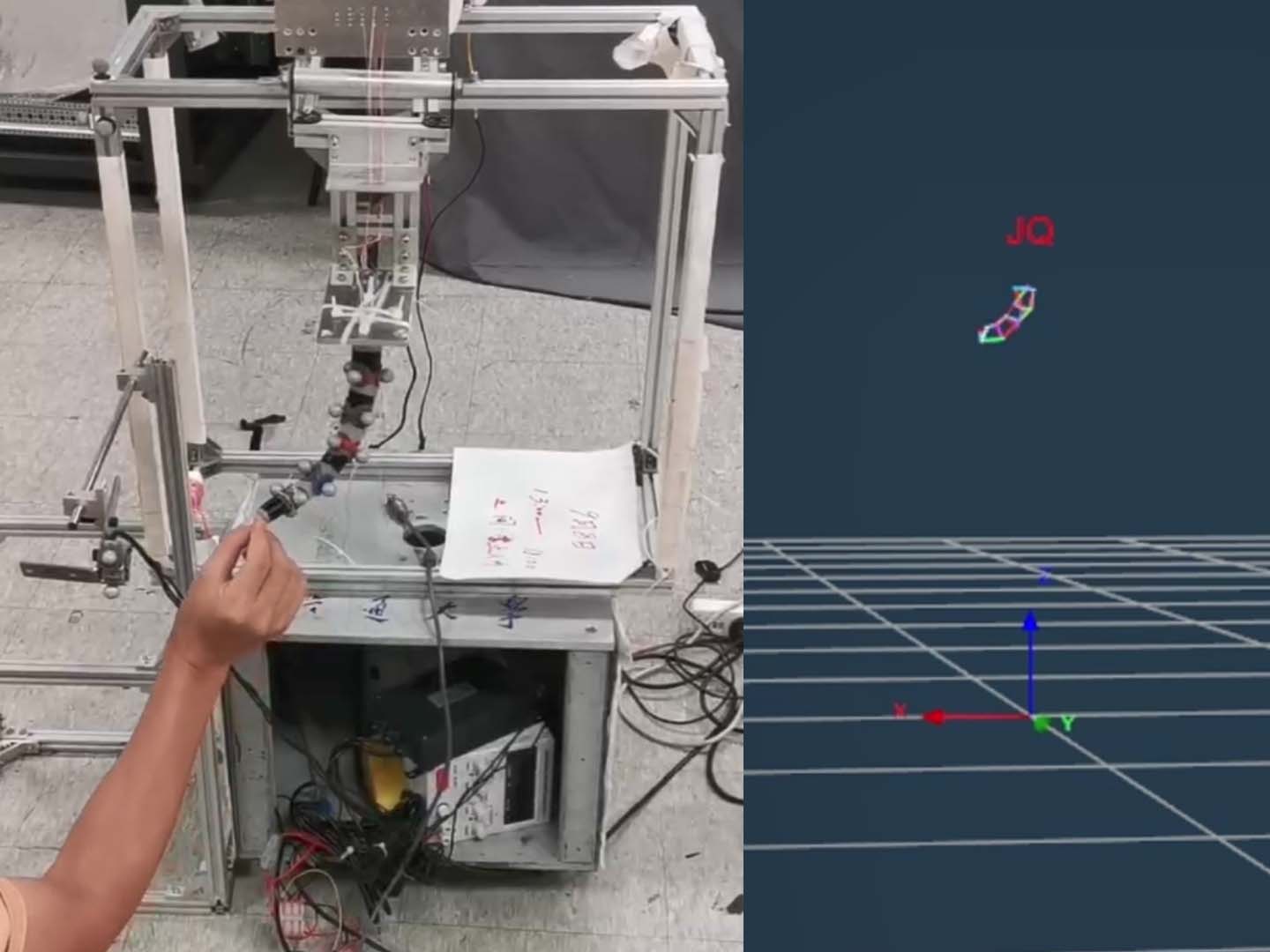
实验过程如下图所示,将Kinect相机固定在可升降的支架上,在相机彩色镜头和深度镜头范围内任意位置悬挂一个柑橘果实,首先通过NOKOV度量动作捕捉系统分别捕捉柑橘果实及相机在其坐标系下的空间位置,作为系统真实值,然后利用上述定位方法获取柑橘果实在相机坐标系下的空间位置。通过对比NOKOV度量动作捕捉系统得到的相对位置真实值与上述定位方法得到的相机与柑橘果实的相对位置来评价该方法的定位精度。

通过对比NOKOV动作捕捉系统和Kinect相机测得的20组不同位置的柑橘果实的三维空间坐标可知,在x轴方向上的平均定位误差为2.51mm、在y轴方向上的平均定位误差为2.71mm、在z轴方向上的平均定位误差为3.35mm。由实验结果可知,通过上述定位方法获取的果实的三维空间坐标与果实真实的三维空间坐标之间的误差较小,在实验误差范围以内,能够满足采摘机器人对于果实的定位精度要求。
参考文献:[1]熊龙烨. 自然场景下成熟柑橘果实分类识别与定位方法研究[D]. 重庆理工大学, 2020.





















































更多详情,请留言
-
您可致电010-64922321或在右侧留言,获取您专属的动作捕捉解决方案与报价单
-
- 领域 *
- 提交留言
