



井下无人机的远程跟踪在环境探测、人员救援和安全监测中发挥着重要作用。不过,它在井下可能会陷入两难的境地——传输高精度数据需要大量耗能。
由于GPS和惯性导航系统(INS)在井下无法解决信号和精度的问题。所以基于超宽带(UWB)和惯性测量单元(IMU)的融合成为了最佳答案,它在精确测距、抗多径效应和穿透能力方面优势明显。
按需耗能 不做无用功
中国矿业大学计算机科学与技术学院,提出了一种基于超宽带和惯性测量单元融合的按需精确跟踪框架(OPT)。首先,设计了基于多传感器融合的无迹卡尔曼滤波器,实现具有定制性能的能量高效跟踪。其次,OPT提供了一种超宽带信号传输的自适应调整机制,在煤矿无人机本地定位的精度和能耗之间进行权衡。最后,开发了一种用于无人机远程跟踪的按需触发算法,以确定数据是否传输到地面服务器。特别是在复杂的井下环境,对按需触发条件进行优化。
场景切换 动捕技术高效完成测试
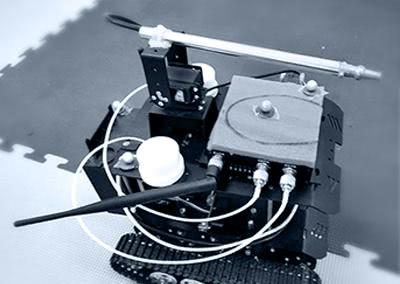
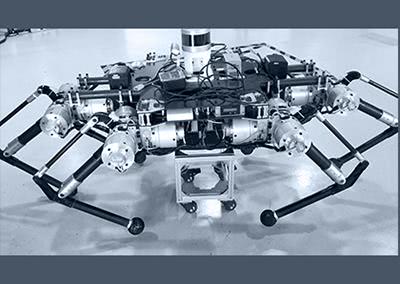
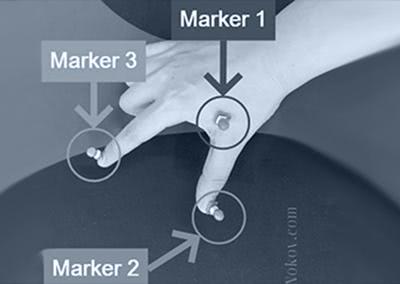
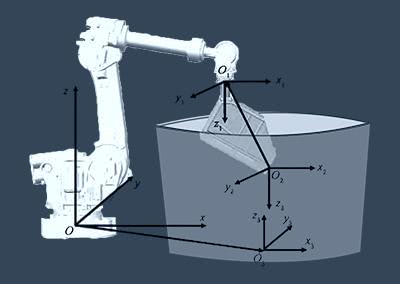
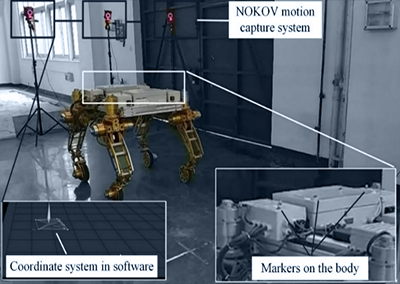
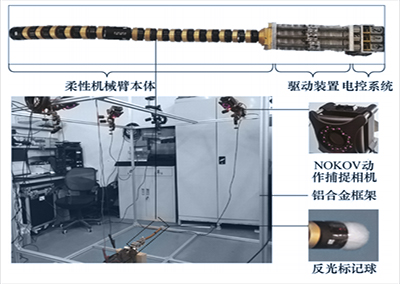
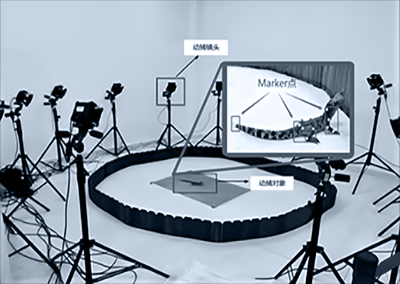
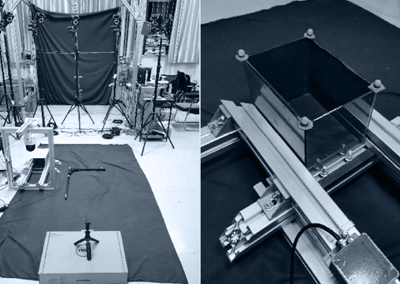
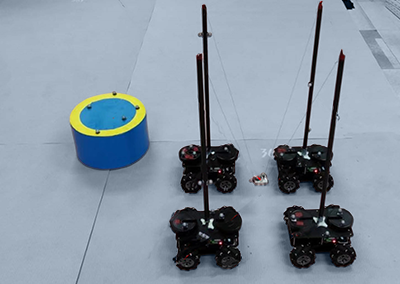
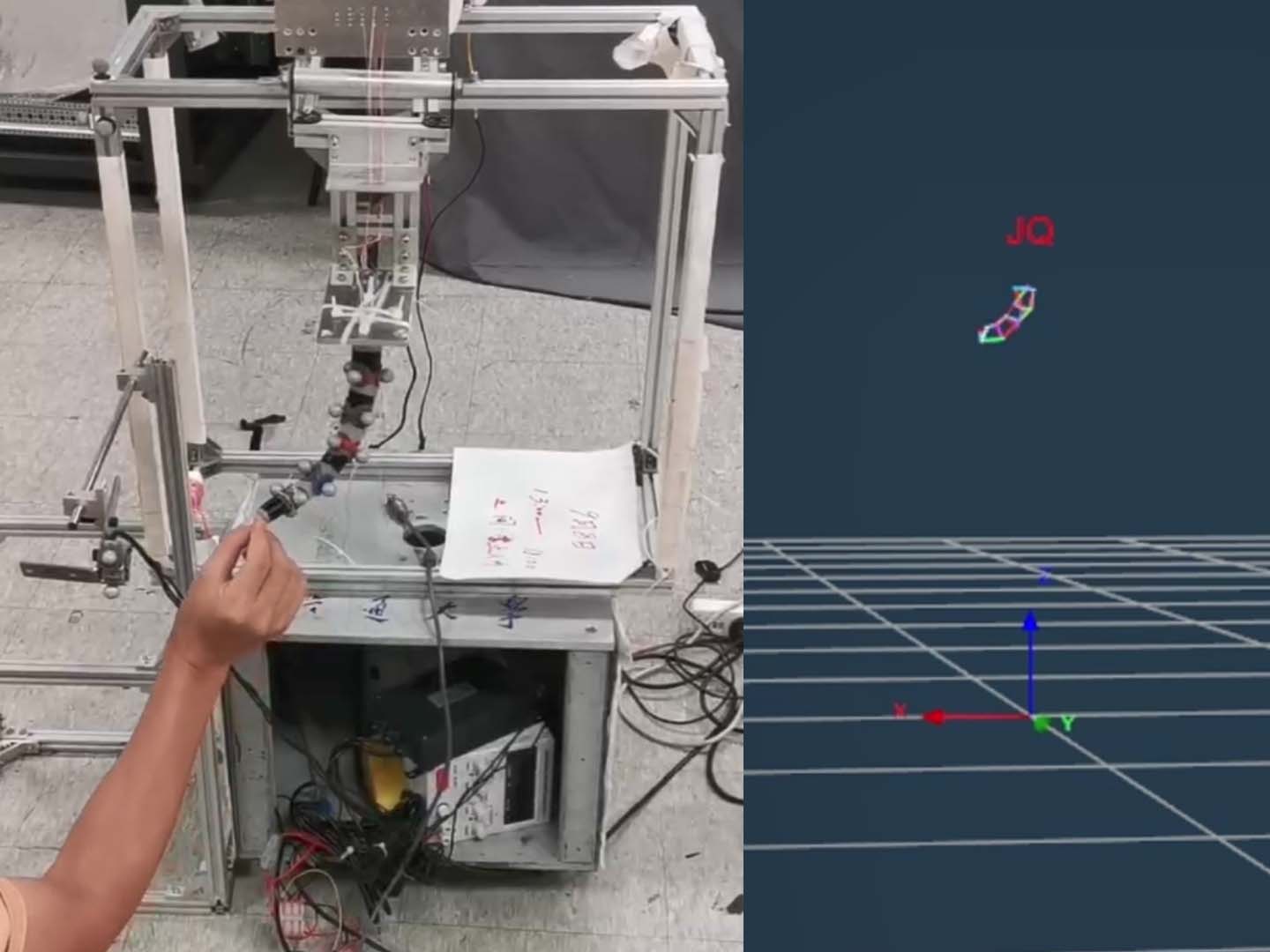
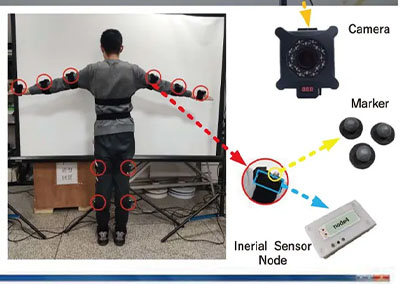
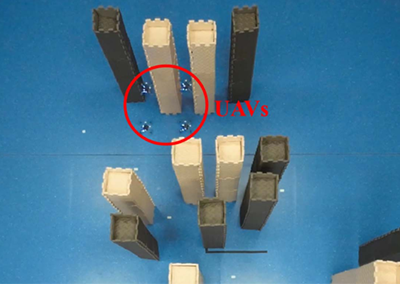
模型分别在室内和煤矿实验室中进行了现场实验,采用了NOKOV度量光学动作捕捉系统获取无人机位置信息,作为追踪性能的评价标准。8个NOKOV MARS镜头分别固定在室内房间及巷道四周,可提供亚毫米级的坐标精度。井下无人机追踪系统由4个位置已知的UWB基站,以及一个搭载UWB移动节点和IMU的无人机组成。

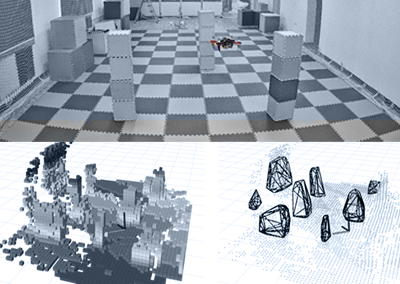
室内无人机定位实验
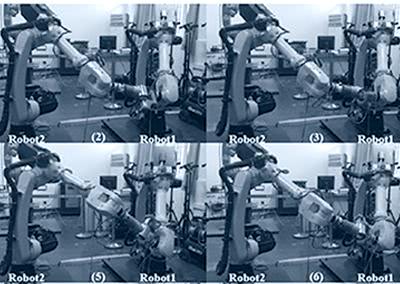
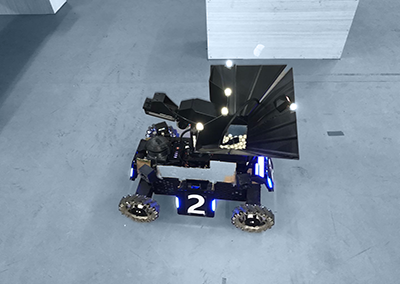
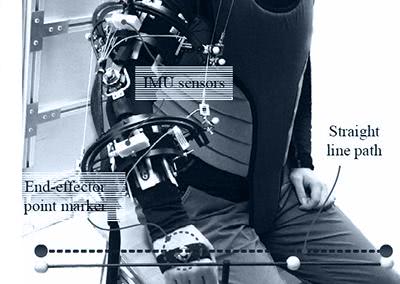
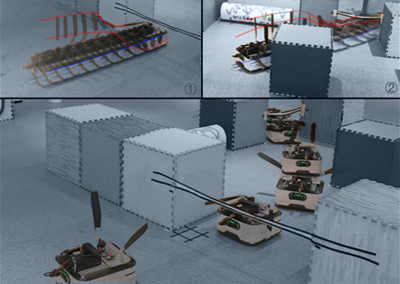
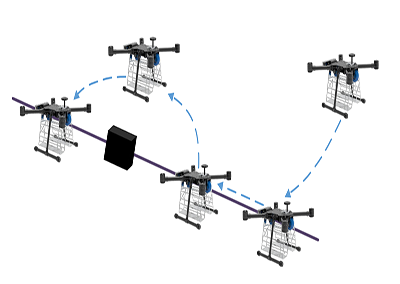
无人机分别在室内和巷道内飞行,UWB移动节点不断与周围的4个UWB基站进行通信以提供无人机到基站的距离信息,IMU提供无人机的加速度以及角速度信息,从而利用OPT进行无人机的位置追踪。

井下巷道无人机定位实验
结果表明,OPT能够在降低40%通信率的情况下,提供0.3米的追踪精度,并降低20%的通信能量消耗。实现了低耗能高精度的井下无人机作业。
参考文献:[1] K. Zhang, P. Chen, T. Ma and S. Gao, "On-Demand Precise Tracking for Energy-Constrained UAVs in Underground Coal Mines," in IEEE Transactions on Instrumentation and Measurement, vol. 71, pp. 1-14, 2022, Art no. 5500814, doi: 10.1109/TIM.2022.3146925.

























































更多详情,请留言

