



研究背景
海洋动物经过长期进化,具有超凡的游动性能。鲸豚类中的海豚除了可以长时间高速游动,还可以完成跃水、空中转体等高难动作。因此,近年来很多学者以海豚为仿生对象开发机器海豚。但是多数研究的动力学模型过于复杂,计算量较大。
为了解决上述问题,深圳大学的巩伟杰老师团队基于胸鳍/尾鳍协同推进模式,采用叶片理论及基于伯努利原理和机翼理论,分别建立了机器海豚的胸鳍和尾鳍的运动学模型和动力学模型。这种模型结构简单,计算量小,便于进行动力学仿真和试验。同时通过对机器海豚运动参数进行分析,利用Matlab进行机器海豚的运动学和动力学仿真,研究不同游动模式和不同运动参数对游动性能的影响。
红外动捕系统起了什么作用
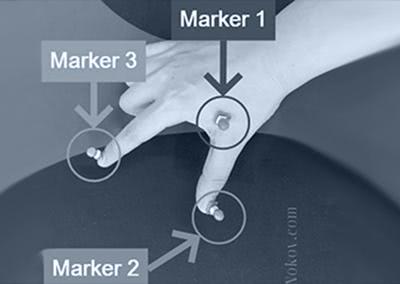
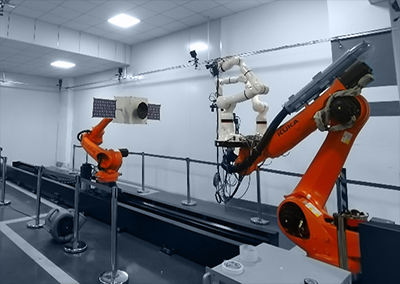
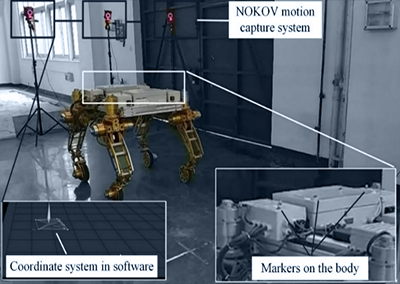
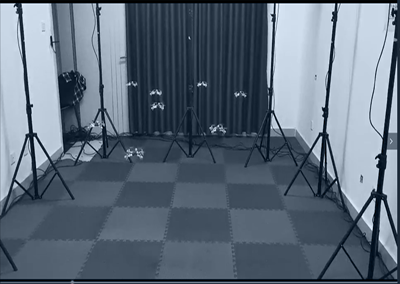
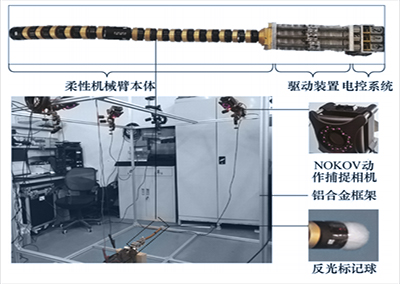
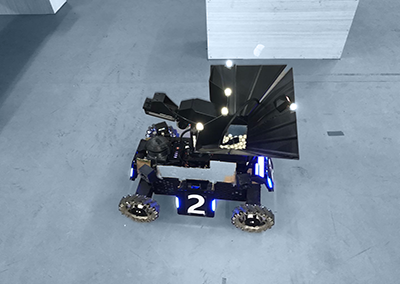
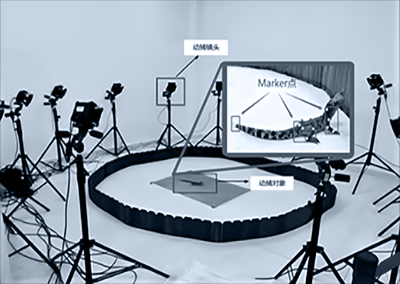
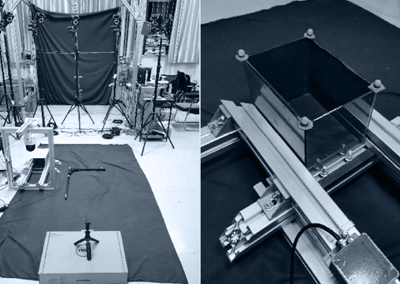
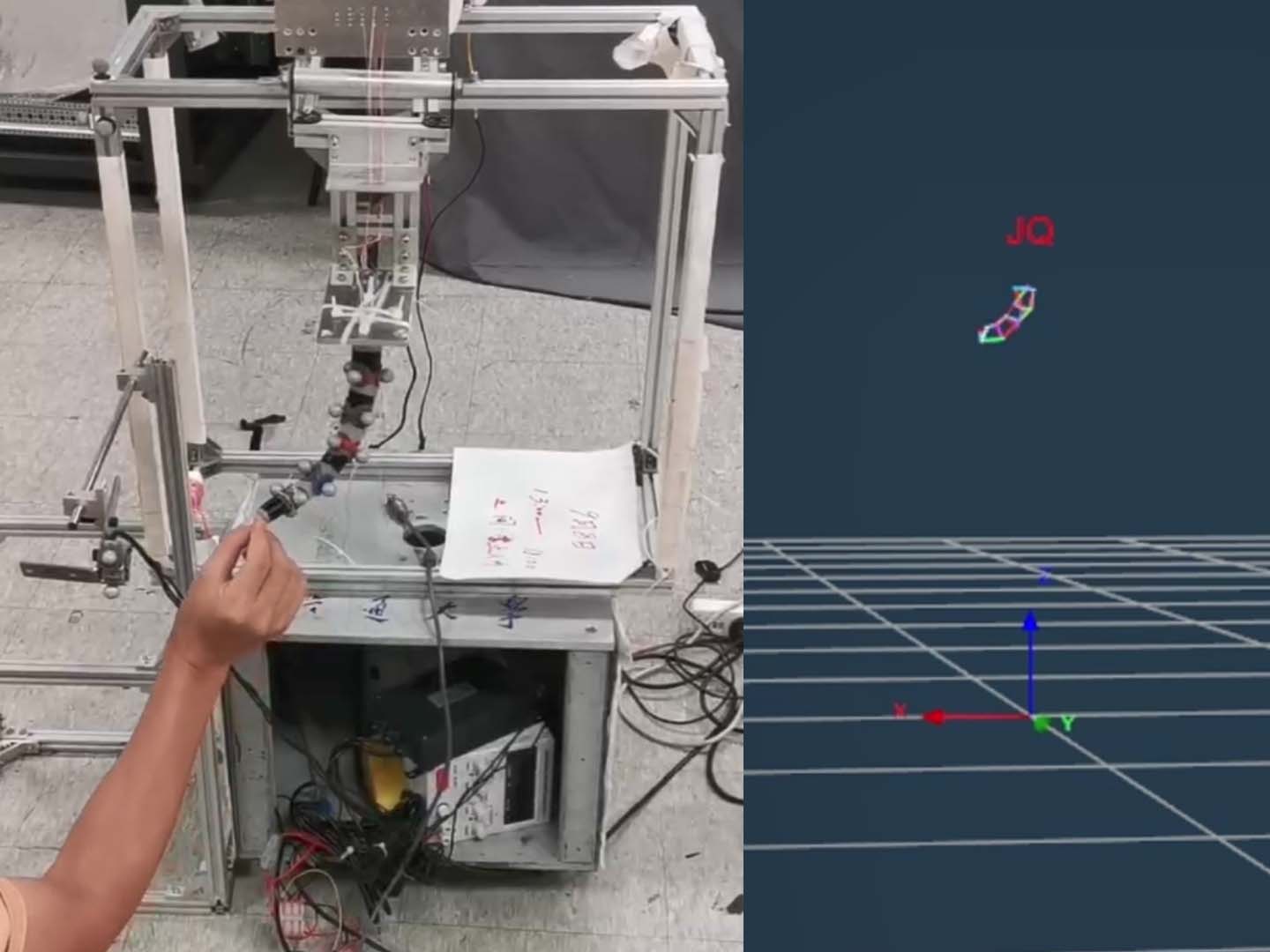
为了验证不同推进模式下机器海豚的游动性能,研究人员进行了测试试验。试验在一个640cm×407cm×150cm的水池中进行,水池周围架设8台NOKOV度量红外光学三维动作捕捉镜头,通过捕捉粘贴在机器海豚上的反光标识点(Marker点)三维空间坐标来获取其游动姿态和运动参数。

图1-试验水池

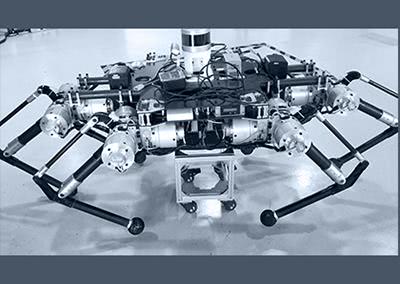
图2-粘贴了反光标识点的机器海豚
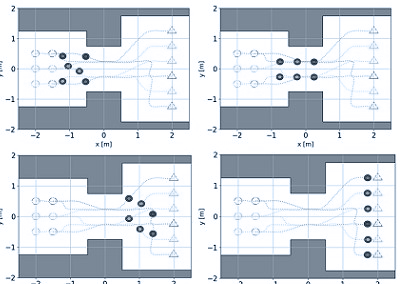
试验结果中,不同模式下结果与仿真结果相吻合。而试验的直游速度低于仿真结果,是由于机器海豚游动过程中波浪扰动产生的阻力。试验验证了这种胸鳍/尾鳍协同推进的动力学模型的有效性,并证明了胸鳍/尾鳍协同推进能提高机器海豚的游动性能,在相同摆频条件下,尾鳍产生主要推进力。

图3-不同推进模式下的仿真与试验
这项研究有助于进一步认识和研究海豚的运动机理,从而提高机器海豚的游动性能。
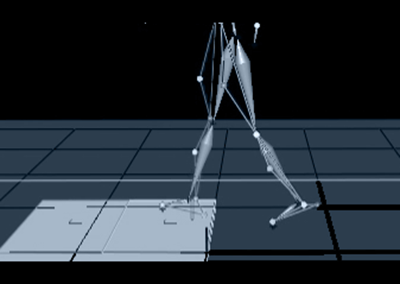
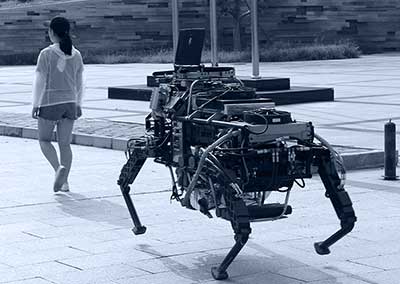
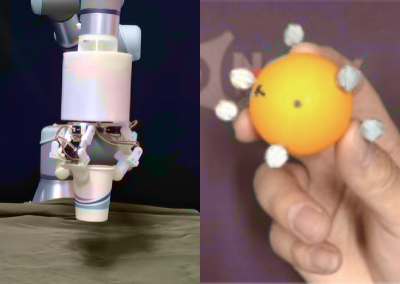
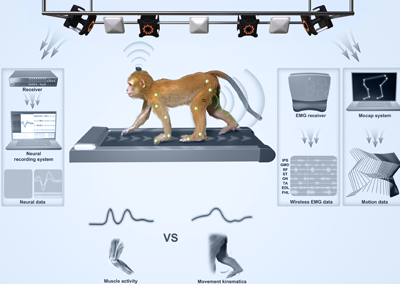
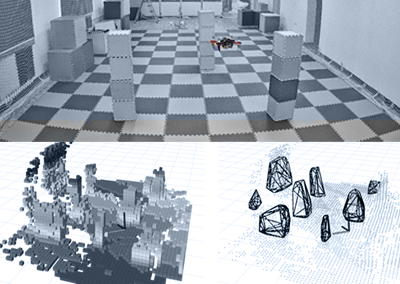
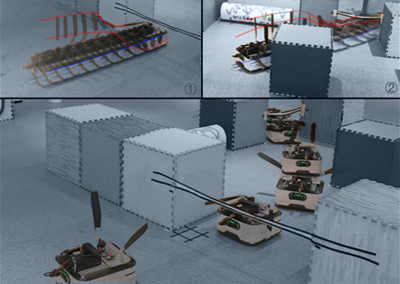
除了机器海豚,NOKOV度量红外动捕系统还应用于多个仿生机器人开发项目,用于获取动物运动数据,或评估仿生机器人性能。
阅读链接:
https://mp.weixin.qq.com/s/aUyb4uIZTzLnygQDRsiqcg
https://mp.weixin.qq.com/s/NcIIS-bng4-VyvP0KuMY9w
此外,我们还开发了用于水下场景的动作捕捉系统。
阅读链接:
https://www.nokov.com/motion-capture-marine-underwater.html
参考文献:[1]杨忠华,巩伟杰.胸鳍/尾鳍协同推进的机器海豚动力学建模与仿真[J].船舶工程,2021,43(09):140-145+151.DOI:10.13788/j.cnki.cbgc.2021.09.25.





















































更多详情,请留言
-
您可致电010-64922321或在右侧留言,获取您专属的动作捕捉解决方案与报价单
-
- 领域 *
- 提交留言
