




火星漫步车(右1:机遇号 右2:好奇号)已经不断升级,但要达到电影中的载人漫步车级别(图左)还相距甚远
尽管在《火星救援》中,马克达蒙驾驶着漫游车在火星飞奔数千公里,这似乎和一次普通的越野旅行并没什么不同。但实际上,以目前的科技水平,那些被投放在火星上的漫游车,只能用举步维艰来形容。工作了14年136天的“机遇号”漫游车只行驶了45.16公里,而只跑了7.73公里的“勇气号”因为陷入沙坑不能脱困,早在2010年与地球失联。
如何让行星漫游车走的更快更远一直是个难题,除了改善漫游车的电量获取方式,另外一个就是要增强其行驶控制力,避免被困。
无视环境变换 TAWL利用自身运动学自控
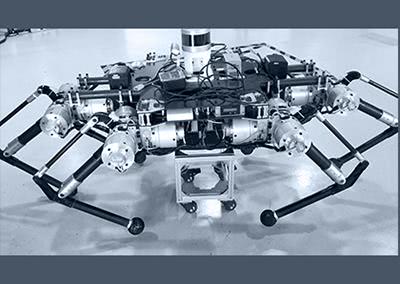
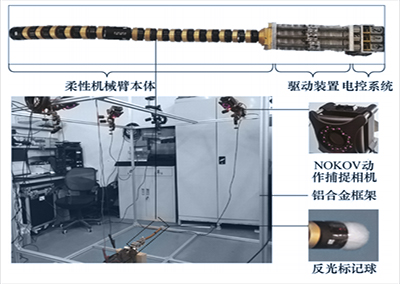
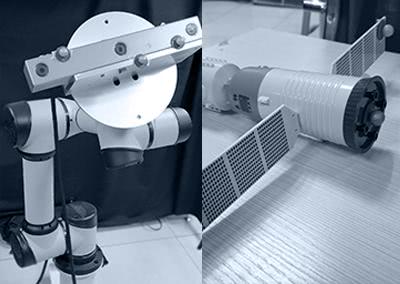
或许这些受尽环境摧残的漫游车应该在轮子上加个“腿”,轮子帮助行驶,有“腿”更不易被困。上海交通大学高峰教授团队正在研发的TAWL——具有地形自适应轮速分配能力的轮腿漫游车,有机会大幅度提升行星漫游车的行驶能力。NOKOV度量动作捕捉技术也参与到了TAWL的研发测试工作,助力行星漫游车的技术创新。
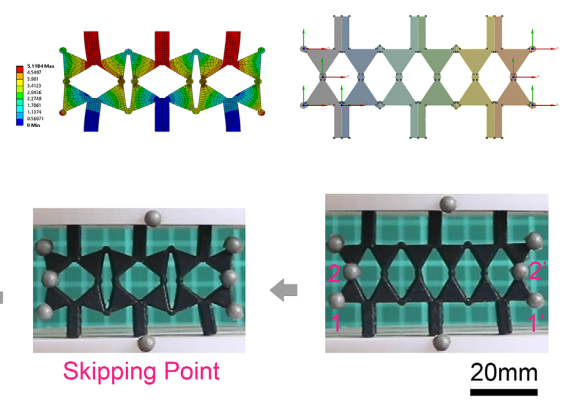
在极度缺少地外行星环境数据的情况下,依赖地形力学的车身控制系统显然有点费力不讨好。而通过自身运动学理论出发,提高适应性和可控性则会更高效。TAWL采取的后者,在其控制系统增加了WSA(轮速分配)、RPC(横摇与俯仰控制)、CFC(接触力控制)及车轮转向模块。这些控制模块可以减少车身因地形带来的滑移,并维持每个轮子上均匀的负载,保持车速和牵引力,减少漫游车被困沙地的风险。
动捕技术助力漫游车行驶测试

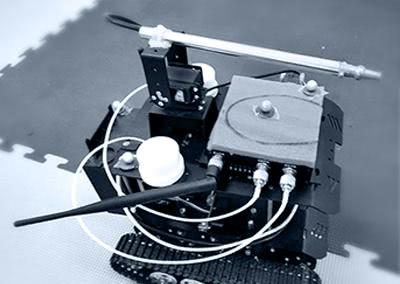
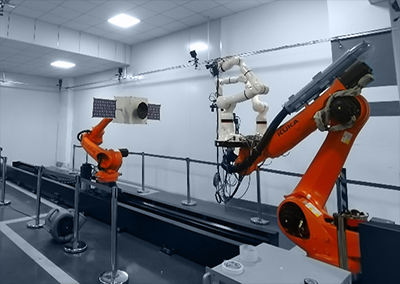
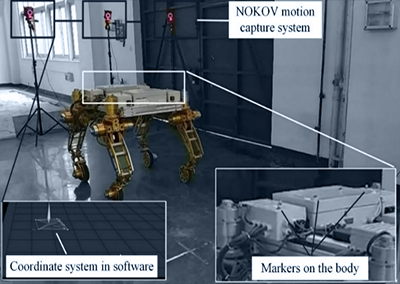
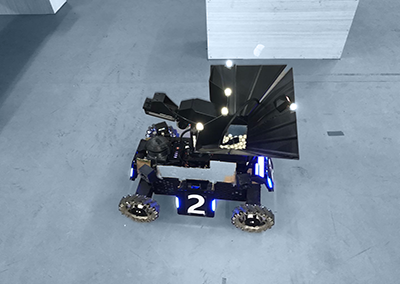
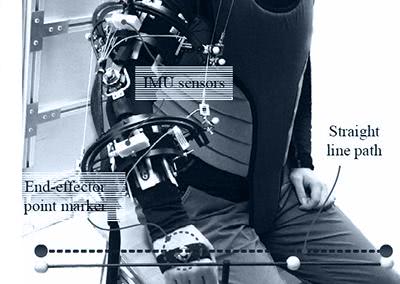
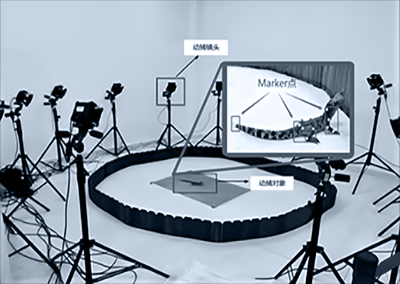
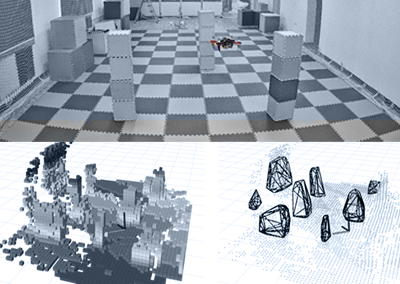
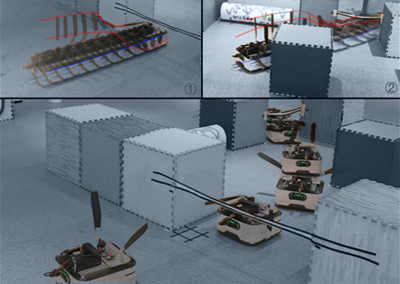
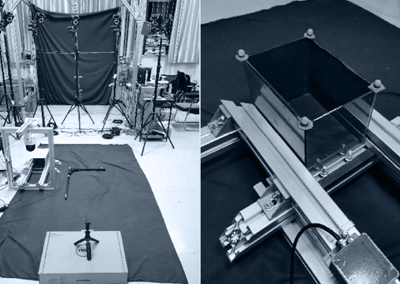
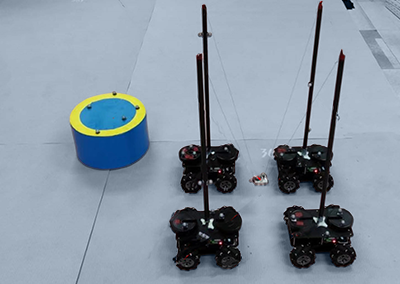
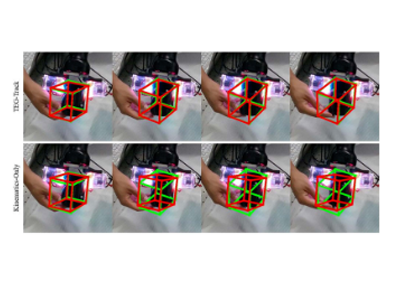
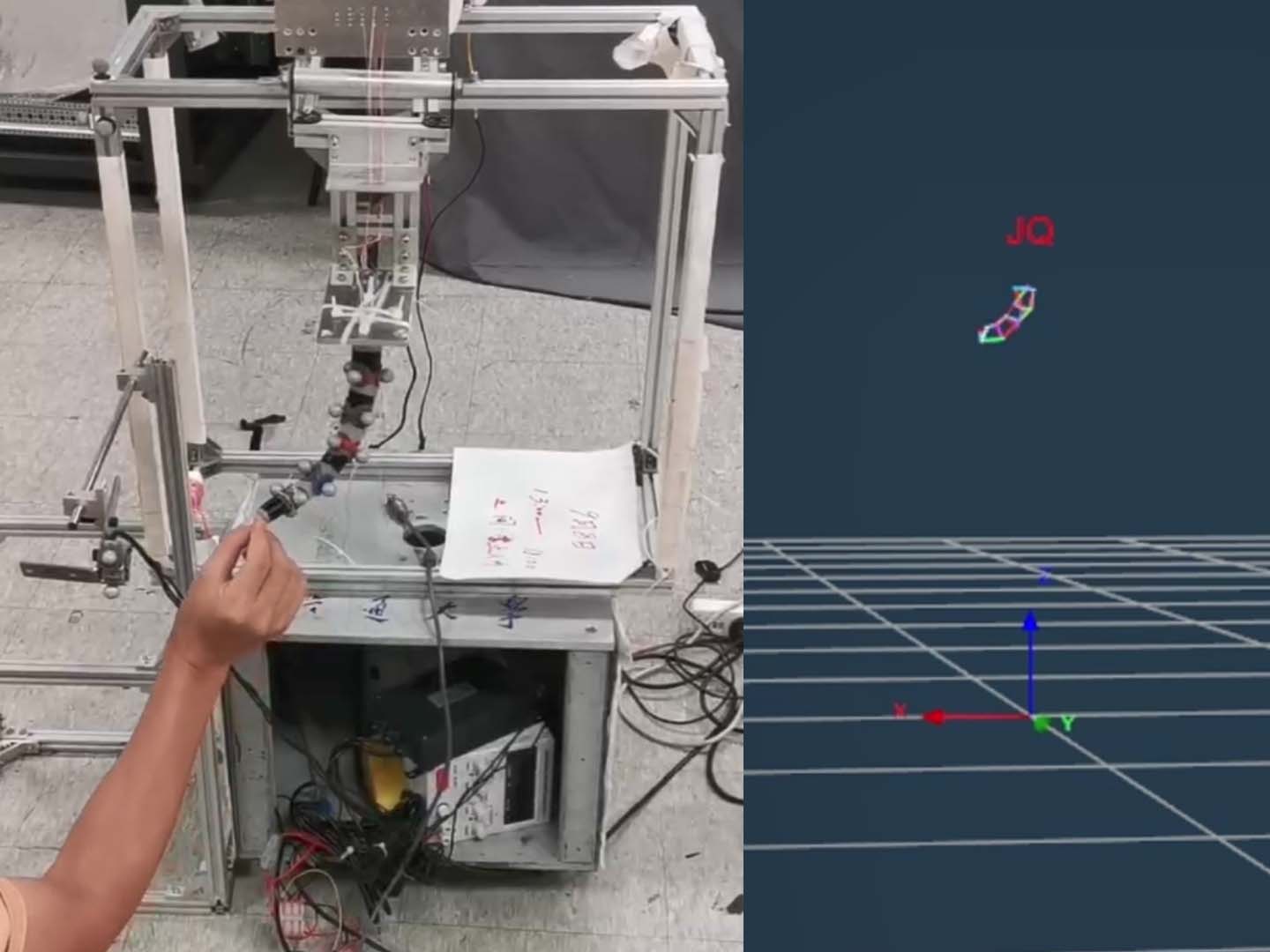
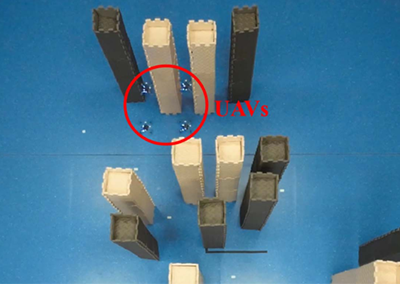
NOKOV度量动作捕捉测试现场,TAWL已被“锁定”
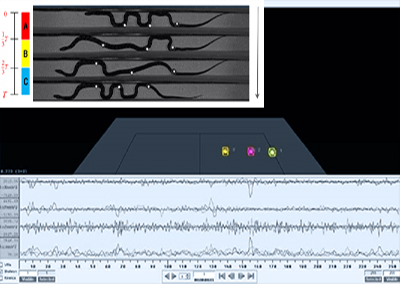
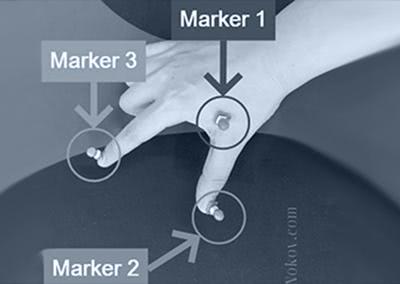
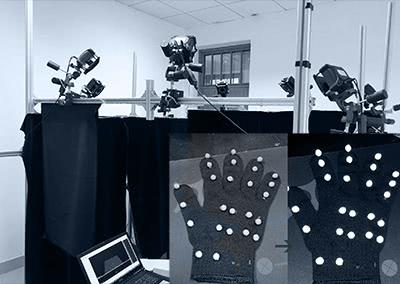
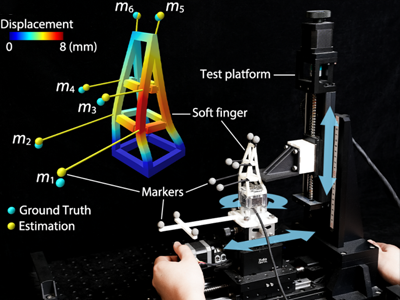
模拟环境测试收集数据和高明的设计理念同等重要。在已经搭建好的NOKOV度量动态捕捉测试场地中,TAWL需要经过规则地形和不规则障碍地形的双重测试。Mars动作捕捉相机通过采集三维空间XYZ坐标、六自由度(6Dof)、偏航角(Yaw)、横摇角(Roll)、俯仰角(Pitch)、欧拉角等数据,为漫游车的行驶过程提供动作数据基础。在已安装固定好的5台Mars动作捕捉相机下,车身上的4个反光mark点,会将行驶数据真值毫无保留的传输到电脑上。
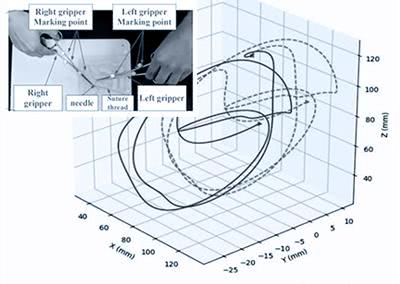
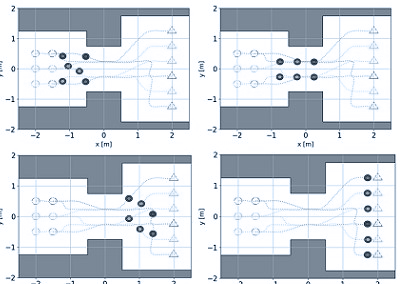
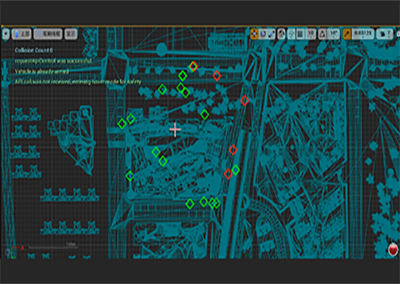
自控测试通过多组动作捕捉的数据,将控制模块不断优化,最终达到了理想效果。经数据分析,TAWL所安装的控制模块有效减少了车身滑移所带来的牵引力降低,由于RPC、CFC和WSA模块的高效介入,车身滑移可以减少近50%。在漫游车车身控制方面,提供了有效的解决办法。

测量数据显示,控制模块的接入有效降低了车身滑移
“不放过每一个细微的动作,并数据化展示。”是NOKOV度量动作捕捉系统对科研工作的技术支持。强大的硬件配置及专业的工程实施,为更多的科学实验助力前行。
参考文献:
[1] Jun He; Yanlong Sun; Limin Yang; Jiaze Sun; Yan Xing; Feng Gao. Design and Control of TAWL—A Wheel-Legged Rover With Terrain-Adaptive Wheel Speed Allocation Capability. IEEE/ASME Transactions on Mechatronics,2022,6.
[2] Jun He *, Yanlong Sun, Limin Yang and Feng Gao. Model Predictive Control of a Novel Wheeled–Legged Planetary Rover for Trajectory Tracking. Sensors,2022,4.
原文链接:





















































更多详情,请留言
-
您可致电010-64922321或在右侧留言,获取您专属的动作捕捉解决方案与报价单
-
- 领域 *
- 提交留言
