



导航技术和我们的生活息息相关。行人导航系统是一种为行人提供导航服务的便携式设备,可以适应地下、矿洞等卫星信号拒止的地区,以及大商场等拓扑结构复杂的地区,通常基于MIMU实现,本质上是惯性导航系统的一种。由于采用了 MIMU器件,行人导航系统也面临精度差和误差累积的问题。因此提高行人导航系统的精度、约束误差发散是行人导航领域的热门研究方向。

协同导航技术是提高行人导航精度的一种方案,通过多智能体系统进行节点间导航状态共享、节点间信息测量或者节点位置信息及不确定性信息存储转发的方式来提高各个节点的导航精度。
包含行人节点和无人车节点的多智能体系统是一类典型的异构多智能体系统。无人车通常可以搭载丰富的导航设备,比如相机、雷达、GNSS、高精度惯性传感器等,具有较高的导航精度。此时在行人节点和无人车节点间运用协同导航技术,可以有效提升行人节点的导航精度,从而提升多智能体系统整体的任务能力。
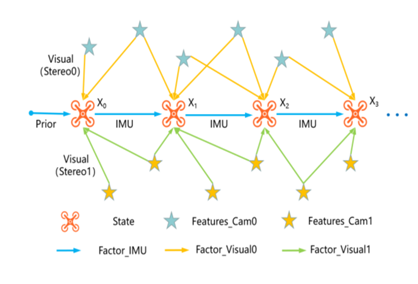
哈尔滨工业大学的研究人员针对人车协同导航,提出了基于因子图理论的协同导航系统模型,并引入遗传算法对导航状态进行寻优完成信息融合。

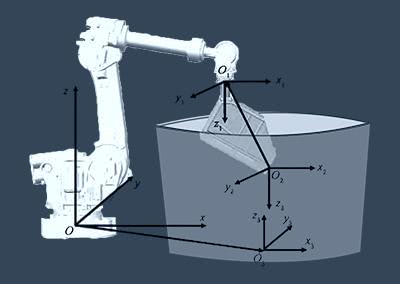
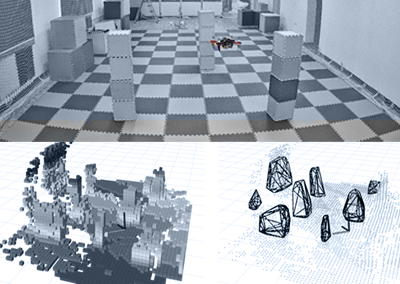
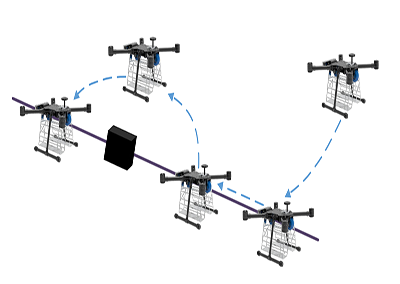
协同导航系统整体架构图
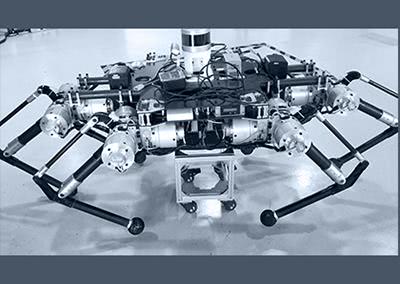
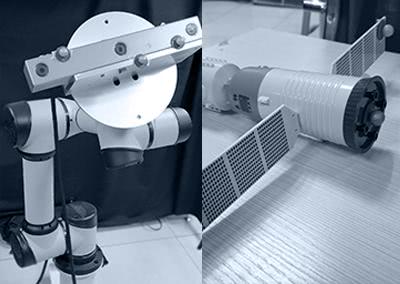
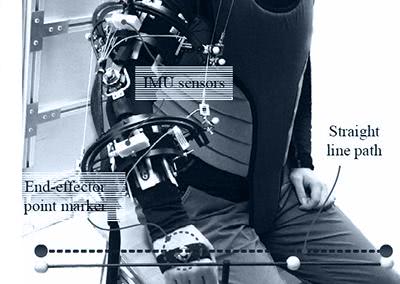
系统中两个节点由高导航精度的无人车构成,一个跟随节点由行人导航体统构成。行人导航节点配备了一个基于 MEMS 技术的惯性测量单元用于测量行人足部的惯性信息。无人车节点相对于导航坐标系的三维位置信息由外部设备提供。无人车和行人导航节点上均配备了 UWB 测距设备,用于测量行人和无人车之间的距离。

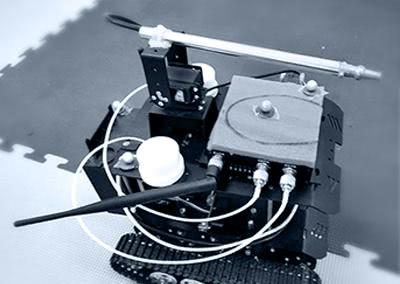
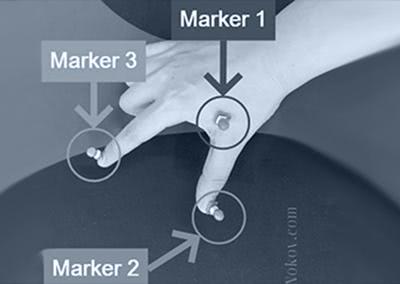
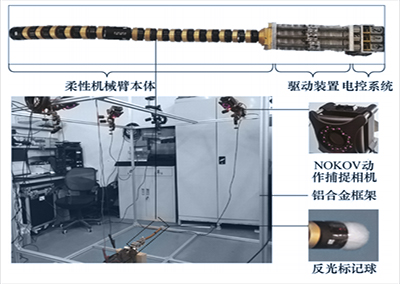
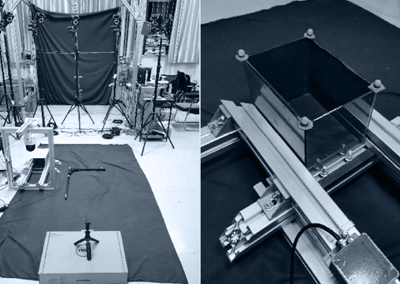
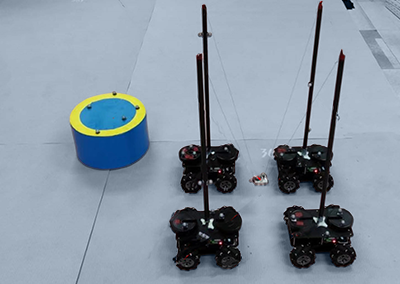
粘贴了反光标识点的UWB基站
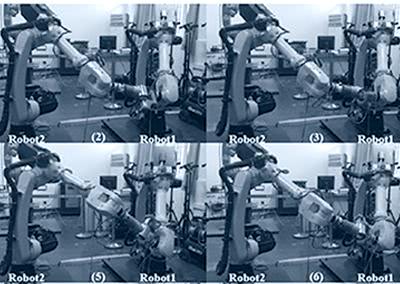
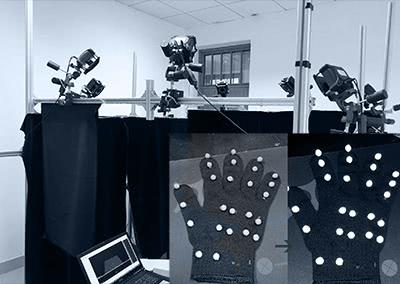
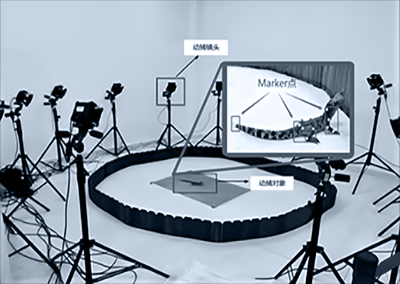
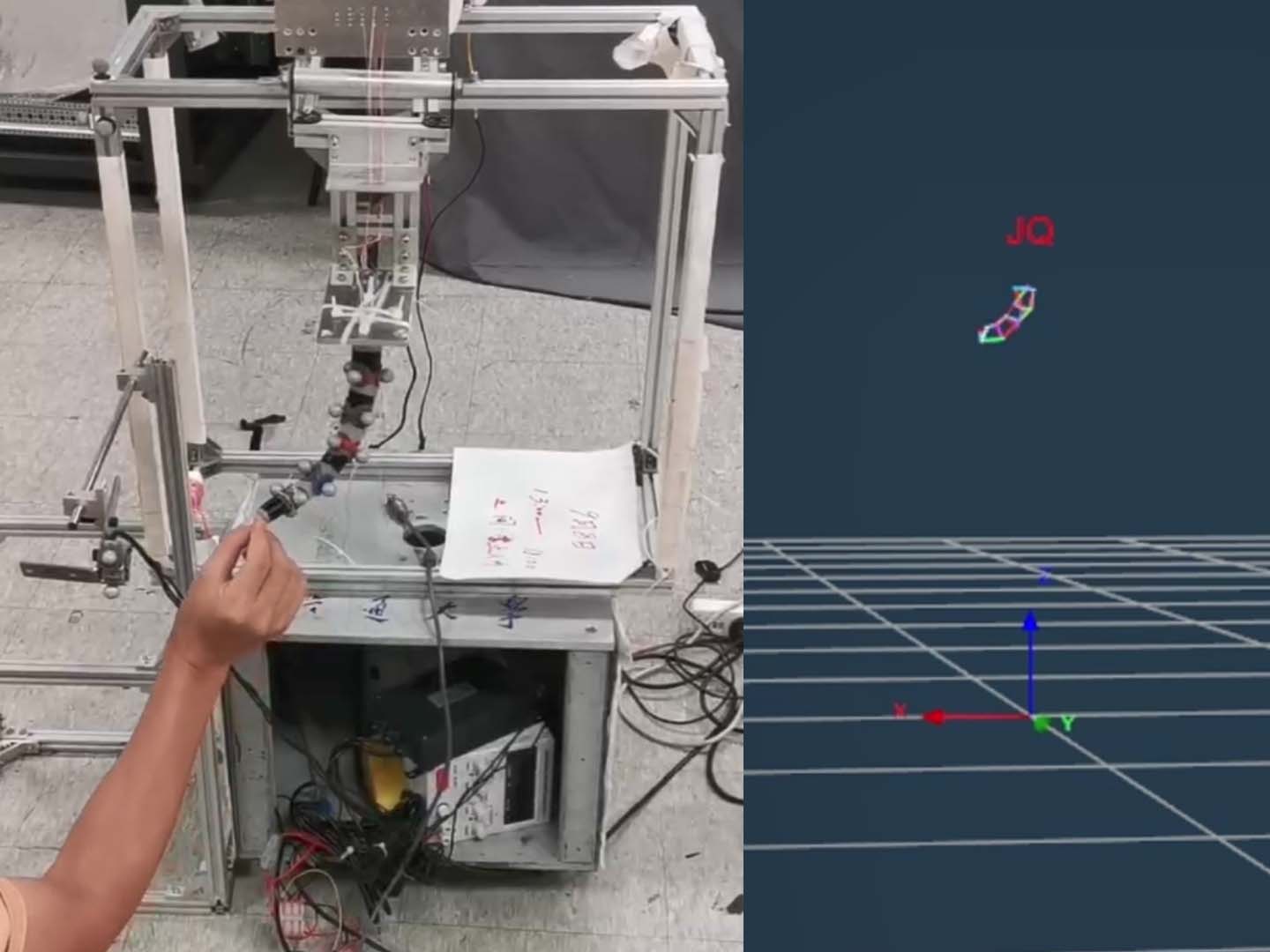
为了验证基于因子图和遗传算法的协同导航算法,研究人员进行了行走导航实验,实验中,由两个UWB基站充当双领航者(替代无人车),其实时位置信息由NOKOV度量动作捕捉系统提供。行人节点配备MIMU与UWB标签,可以对行人节点的机体角速度、机体加速度以及与两个领航节点间的距离进行测量。

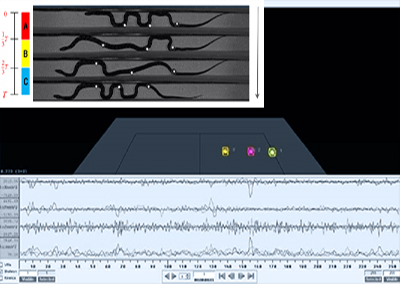
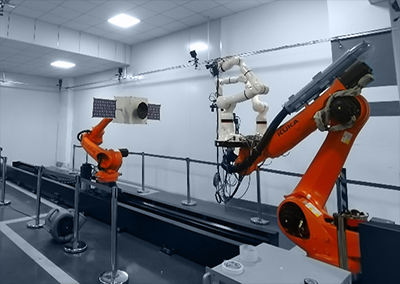
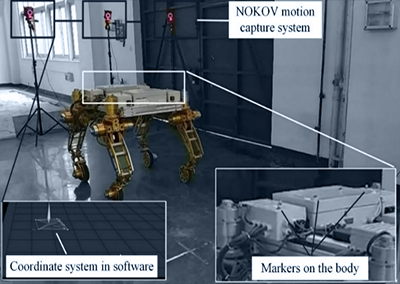
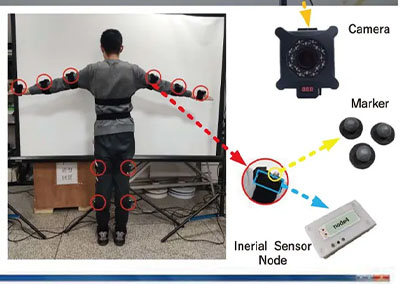
NOKOV度量动作捕捉系统
实验中共进行49.7m里程的行走,在行走过程中,MIMU 测量行人足部的机体角速度与加速度,UWB 器件测量行人足部与双领航者之间的距离信息,利用协同导航算法对行人节点的导航状态进行解算。由于NOKOV度量动作捕捉系统定位精度高,达到亚毫米级,实验中将其获取的定位信息作为行人的真实轨迹值。

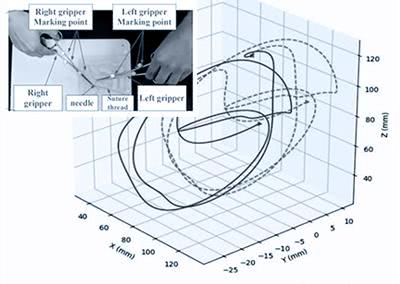
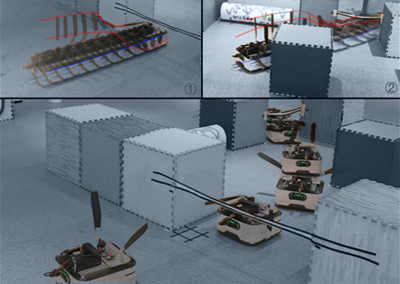
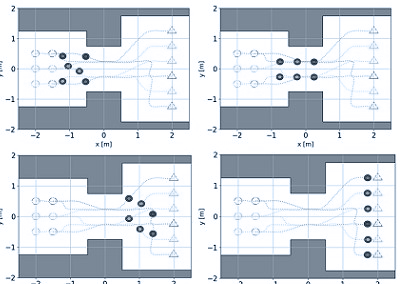
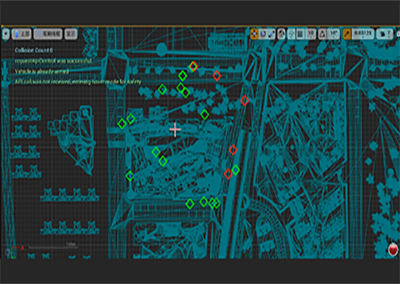
协同导航算法解算轨迹图
实验通过对比协同导航算法解算的行人节点轨迹值和NOKOV度量动作捕捉系统提供的真实轨迹值,完成了算法的有效性和精确度检验。蓝色轨迹为协同导航算法解算的行人节点轨迹值,黑色轨迹为动作捕捉系统提供的真实轨迹,实验验证结论可得行走终点误差为0.0648米,相对行走里程的误差率为0.13%,符合算法有效性验证预期结果。
参考文献:[1]黄灿. 基于因子图的人车协同导航算法[D].哈尔滨工业大学,2021.





















































更多详情,请留言
-
您可致电010-64922321或在右侧留言,获取您专属的动作捕捉解决方案与报价单
-
- 领域 *
- 提交留言
