



经典案例
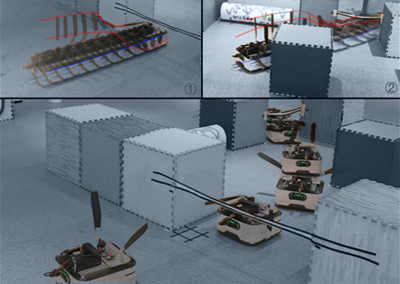
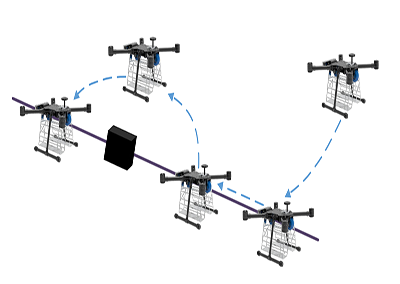
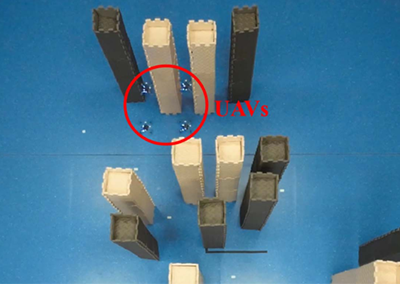
无人机编队与协同控制
电子科技大学
协同控制、Crazyswarm
Crazyflie无人机
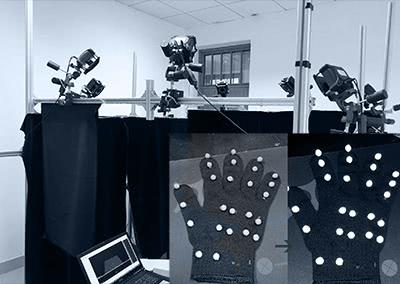
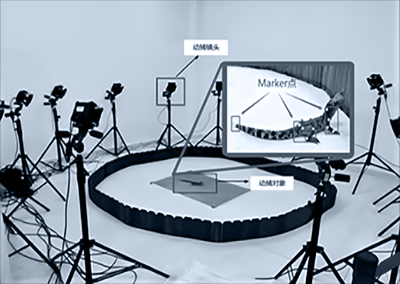
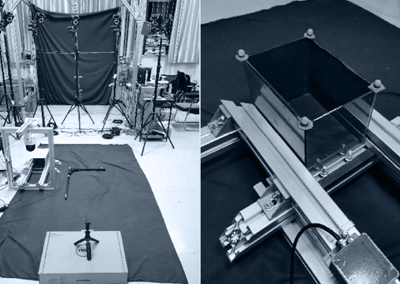
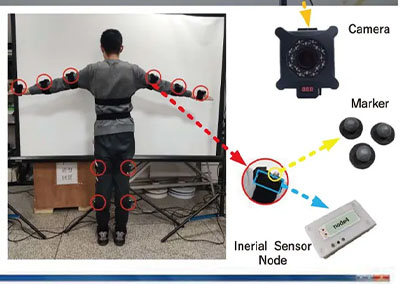
12个Mars 4H动作捕捉镜头




























































更多详情,请留言

