



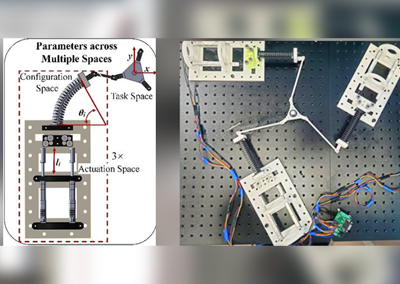
在外骨骼研究中,一个合适的人机耦合模型非常重要,它可以帮助预测外骨骼系统直接作用于人体产生的影响,避免不必要的伤害和能量损失,同时也有助于优化外骨骼系统的设计和控制,提高其佩戴的舒适性和人机交互性。
华南理工大学研究团队提出一种新型人体外骨骼机器人的单元化建模方法,通过动力学实验验证了模型运动学计算的准确性,并将模型应用到外骨骼机器人的设计和控制优化中,设计出新的助力被动外骨骼系统,也能有助于优化机电外骨骼的控制曲线。
动力学实验
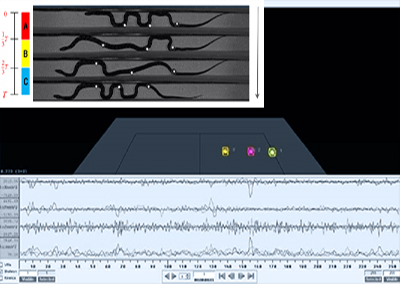
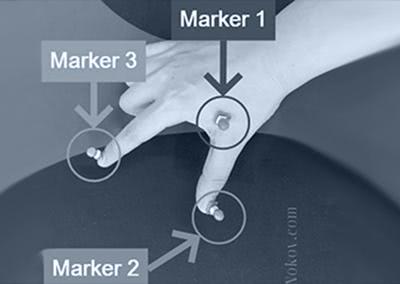
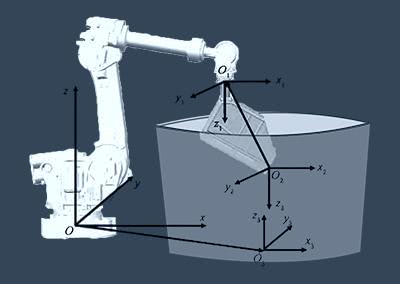
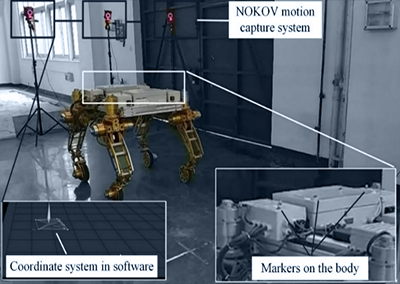
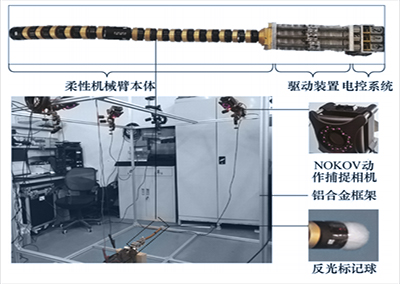
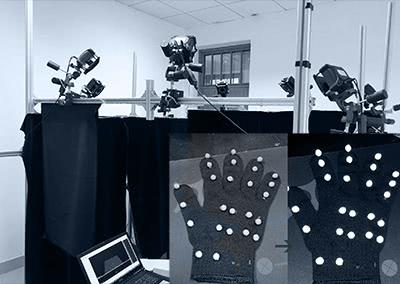
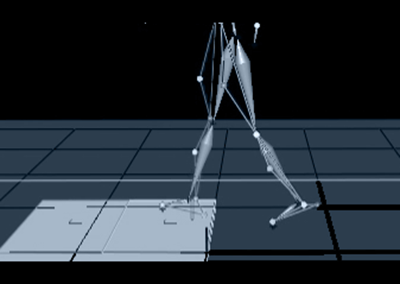
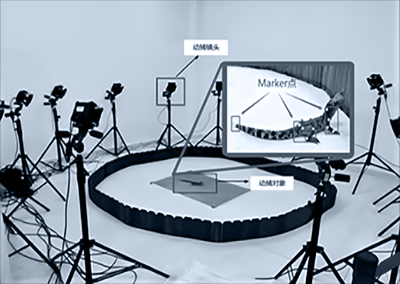
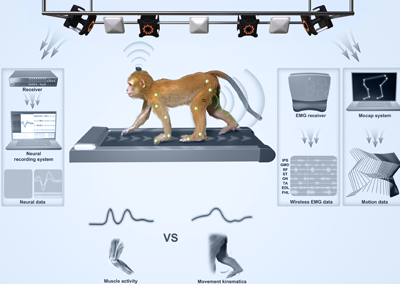
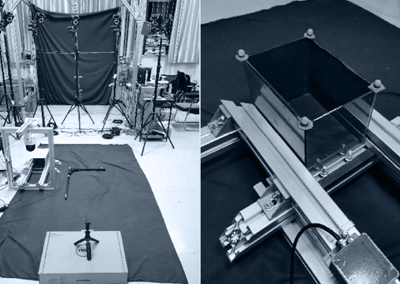
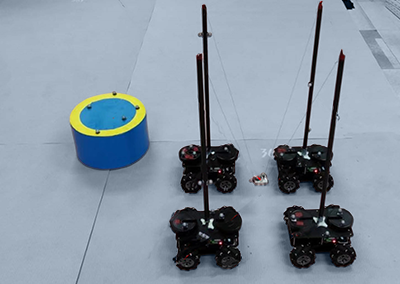
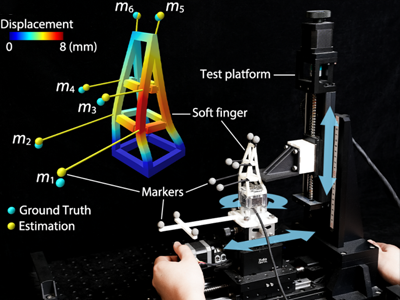
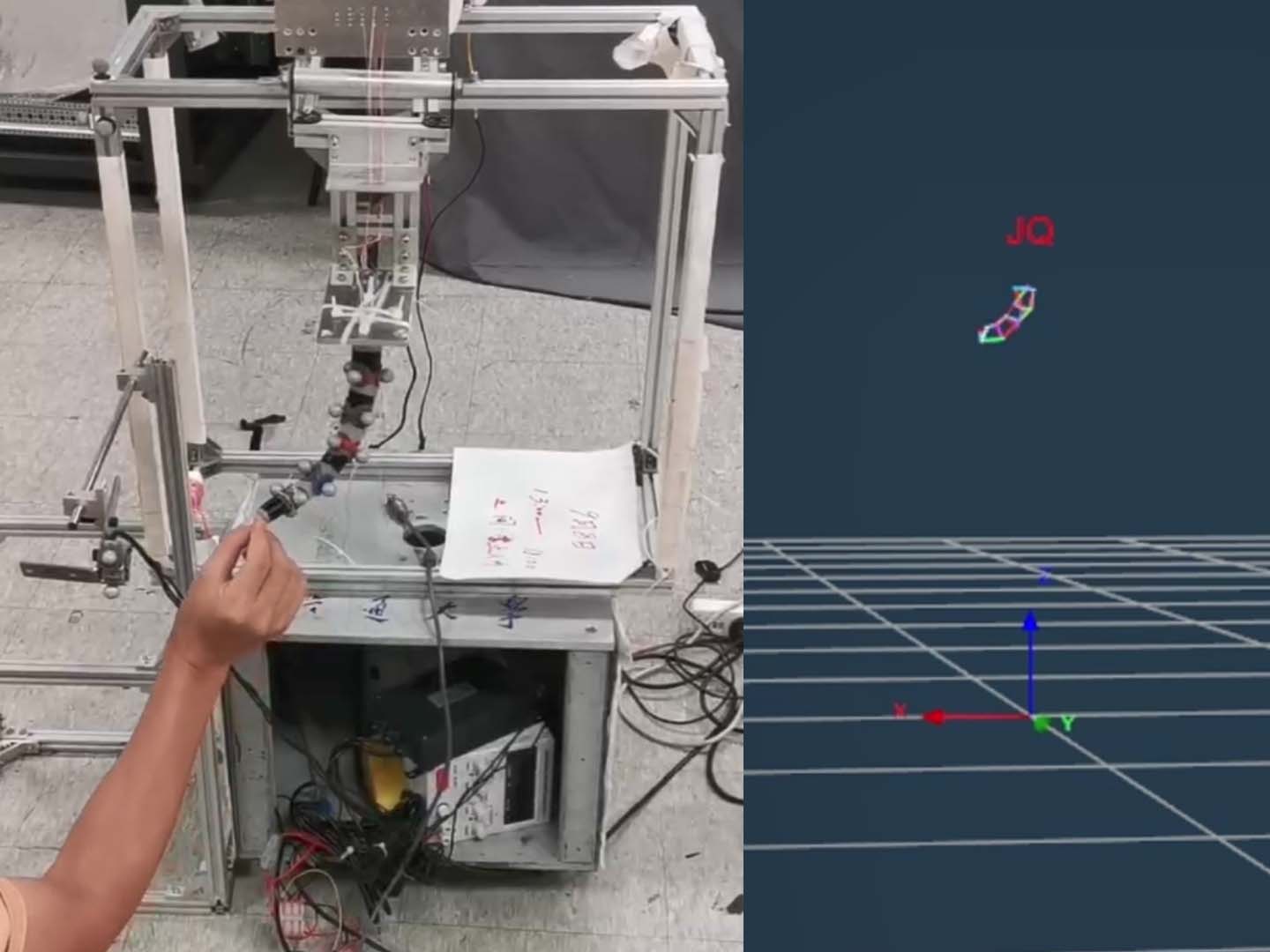
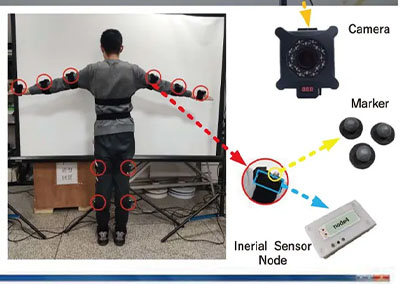
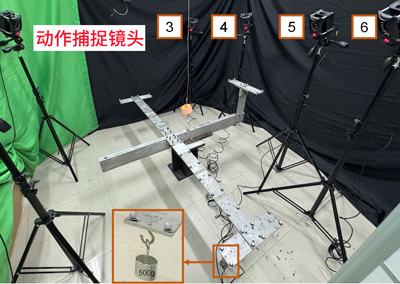
使用NOKOV度量光学动作捕捉系统,获得各单元上各个点的位置速度加速等数据,输入模型中计算出步态行走时双支撑阶段的步态数据,以及对地面的反作用力数据。同时也利用测力板获取两脚触地时的数据。将模型计算出来的数据与测力板获取的数据进行对比,间接验证了模型运动学计算的准确性。

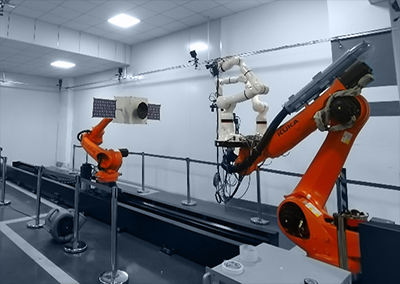
光学动作捕捉系统和测力平台

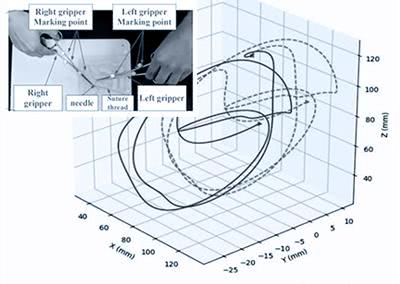
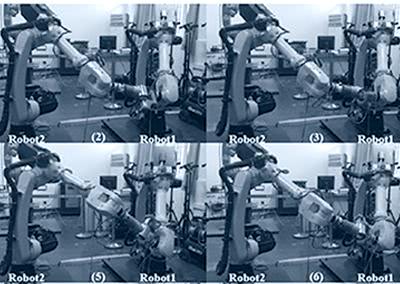
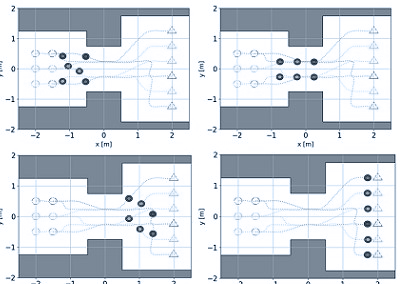
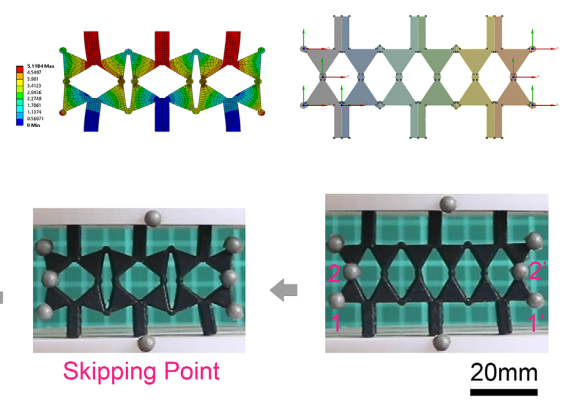
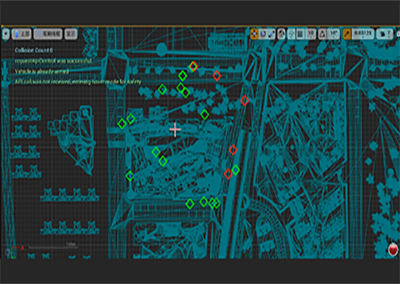
运动学双支撑阶段识别实验结果图
外骨骼机器人的设计和控制优化
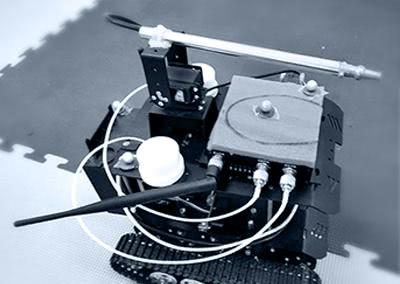
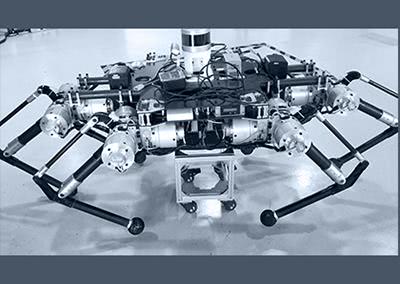
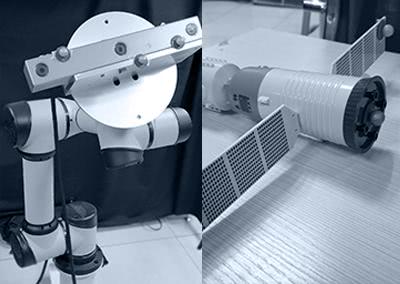
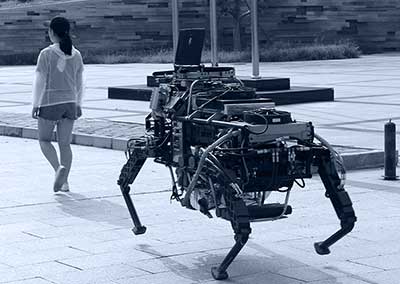
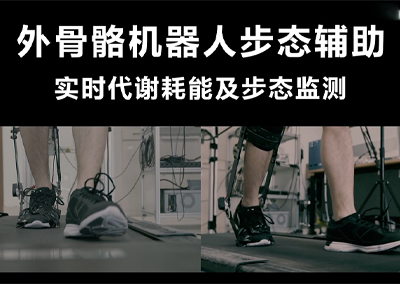
模型理论建立后,基于模型对下肢外骨骼机器人进行了优化设计,设计出一套被动多协同外骨骼实验样机。通过代谢实验,验证人体佩戴外骨骼后是否能有效减少能耗。实验结果表明,被动多协同外骨骼工作时相比不工作时人体代谢平均降低了4.40%。验证了被动外骨骼设计的有效性。

被动多协同外骨骼实验样机
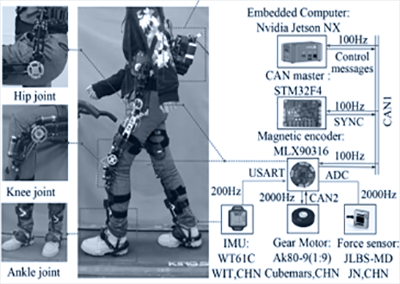
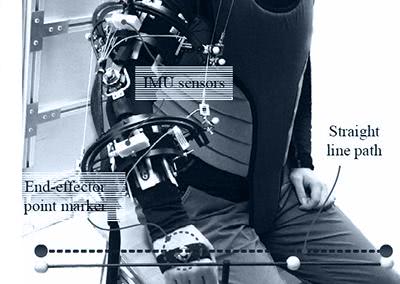
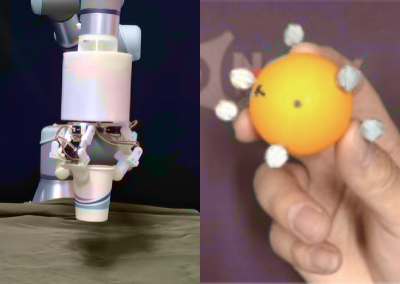
在模型的指导下,还进行了机电外骨骼输出力的优化实验。通过向髋关节机电外骨骼机器人输入控制曲线,对比判定输出力曲线是否能帮助人体减少能耗。实验表明髋关节机电外骨骼使能状态相对于失能状态人体代谢平均降低了1.38%。

佩戴髋关节机电外骨骼机器人和代谢测试仪进行实验
参考文献
岳凡. 人机耦合模型研究及其在下肢外骨骼机器人设计中的应用[D].华南理工大学,2021.DOI:10.27151/d.cnki.ghnlu.2021.003977.



























































































更多详情,请留言
-
您可致电010-64922321或在右侧留言,获取您专属的动作捕捉解决方案与报价单
-
- 领域 *
- 提交留言
