



北京时间2020年12月17日,探月工程嫦娥五号返回器在内蒙古四子王旗预定区域成功着陆,为我国探月工程“绕、落、回”三步走发展规划画上了圆满句号。嫦娥五号任务中实现的一系列关键技术,对于我国提升航天技术水平、完善探月工程体系、开展月球科学研究、组织后续月球及星际探测任务,具有承前启后、里程碑式的重要意义。

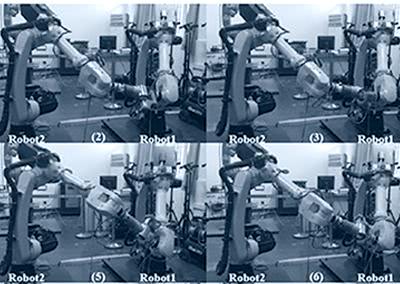
嫦娥五号整个旅程中,其中一大难点就是上升器与轨道器和返回器组合体的月轨交会对接。航天器交会对接作为一种重要的空间活动,为在轨服务、载人航天等空间任务提供基础技术支撑。

由于空间交会对接任务难度大,且成本极高,在航天器进行太空任务之前,需要先进行等效地面模拟试验,以验证控制系统的有效性。地面试验难点是模拟太空的微重力环境,基于气浮台的地面半物理仿真平台(半实物仿真平台)可以较大程度上模拟卫星在轨运动与控制的实际状态,实现高置信度的地面仿真。
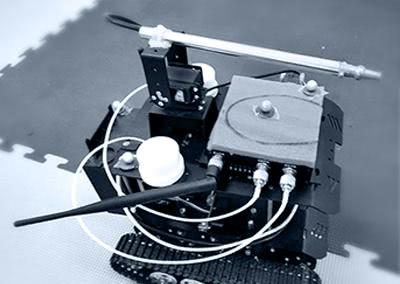
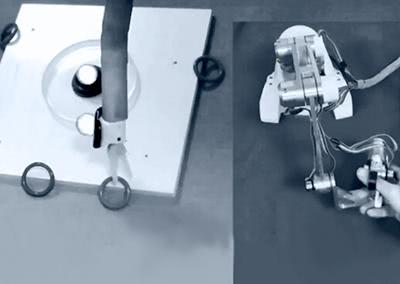
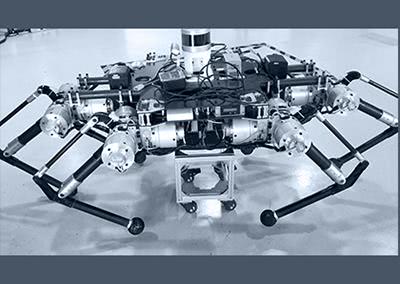
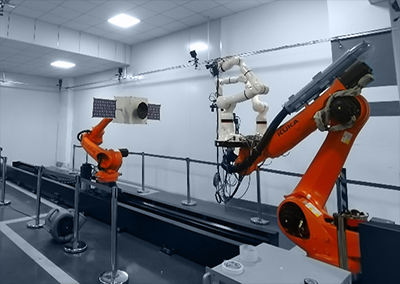
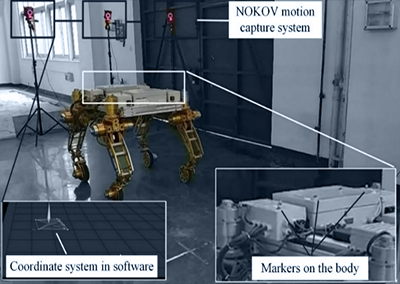
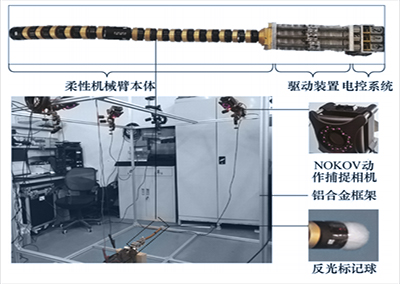
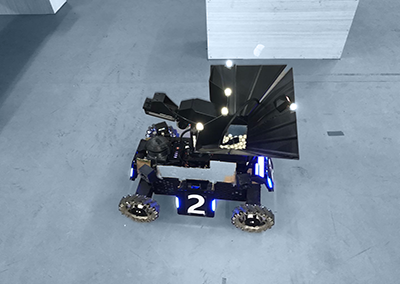
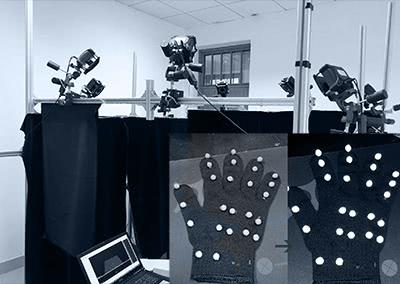
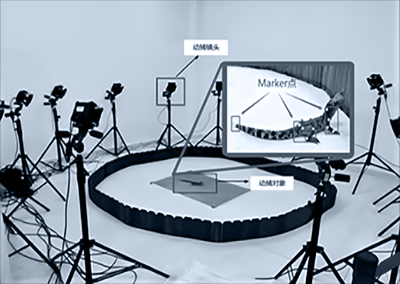
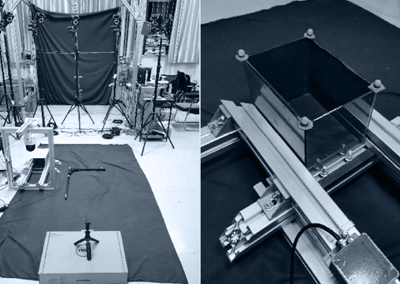
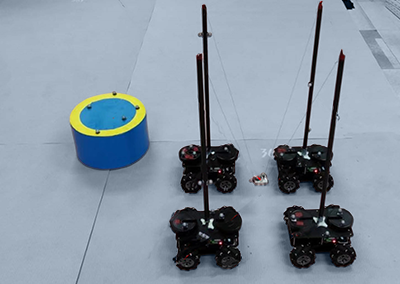
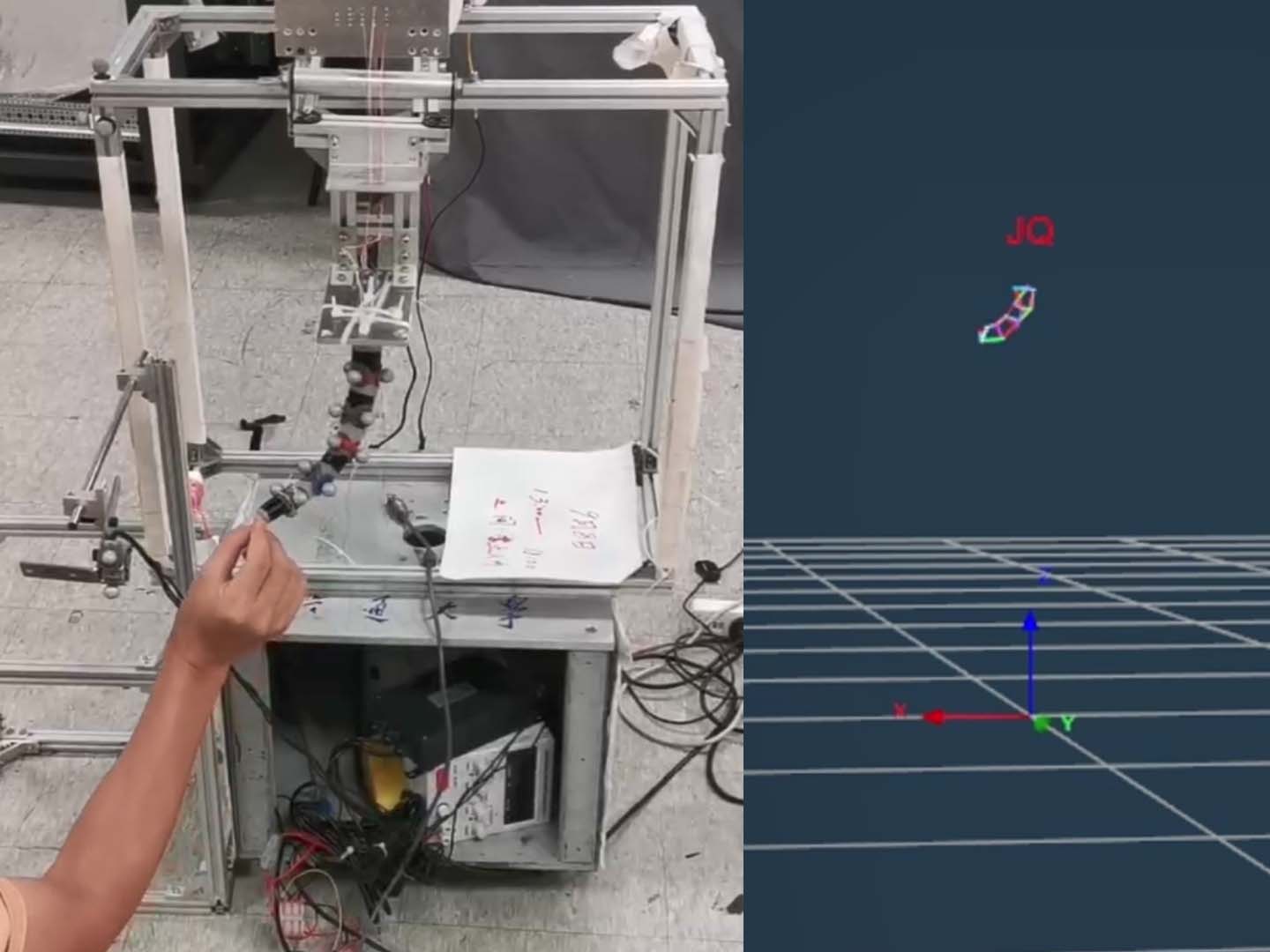
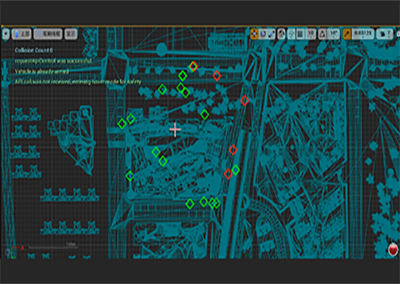
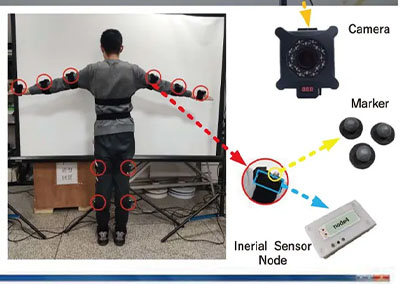
航天器地面半物理仿真平台通常由大理石平台、气浮台(气浮模拟器)、通信系统、测量系统子系统组成。南京航空航天大学航天学院的康国华教授研究团队设计了基于3自由度气浮台的航天器地面半物理仿真平台,并将NOKOV光学动作捕捉系统作为测量系统集成在半物理仿真平台中。场地中在大理石气浮平台四周架设8台NOKOV光学动作捕捉相机,在气浮台顶部按设计好的规则放置反光标志点(marker球),反光标志点随气浮台同步运动。动作捕捉相机作为状态观测器采集计算标志点实时位姿和速度(角速度)等运动状态信息,控制模块结合以上信息和导航参考信号(两气浮台间相对位姿),处理后输出控制力,经过推力分配后输出给执行器每个喷嘴所需喷力,执行器用PWM将信号调制成电磁阀开关脉冲信号,实现喷气,控制气浮台随参考信号运动,快速验证航天器交会控制算法鲁棒性和收敛性能。

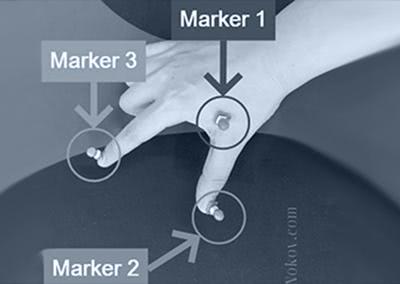
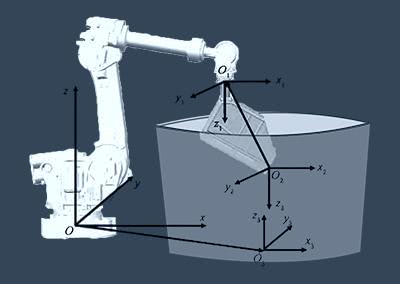
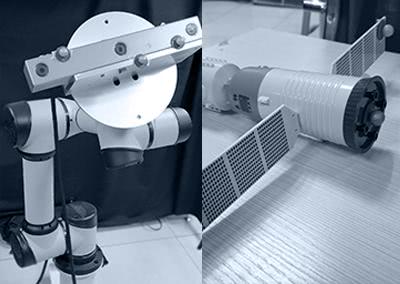
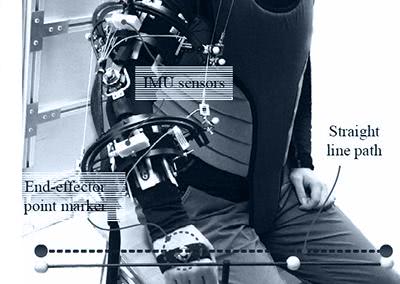
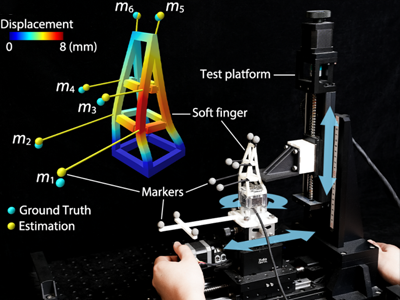
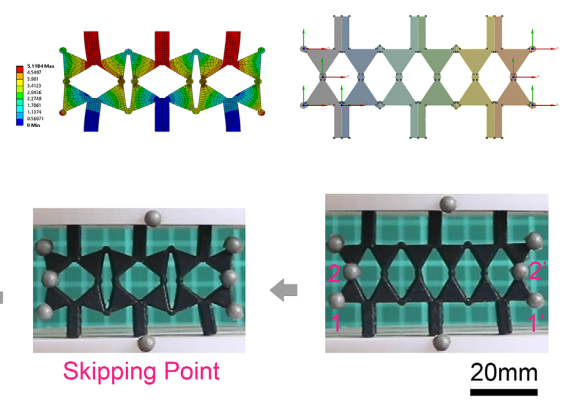
此外,该团队还针对微小卫星半物理仿真系统中平面气浮台质心位置变化(机械臂的运动、燃料的消耗以及卫星的组合和变构)的问题,提出了一种基于位置观测的质心标定方法,并在半物理仿真平台上进行数据采集,通过动作捕捉系统获取到的三轴气浮台台体上的任意三个固定点的实时运动轨迹,实时标定气浮台的质心,验证了方法的有效性。





















































更多详情,请留言
-
您可致电010-64922321或在右侧留言,获取您专属的动作捕捉解决方案与报价单
-
- 领域 *
- 提交留言
