



北京大学与大连海事大学研究团队共同设计了一种深度学习辅助的仿生水下摩擦电胡须传感器(underwater triboelectric whisker sensor, UTWS)用来被动感知各种水动力流场,该成果以题为“Deep-learning-assisted triboelectric whisker for near field perception and online state estimation of underwater vehicle”发表于中科院一区期刊Nano Energy,影响因子高达16.8。
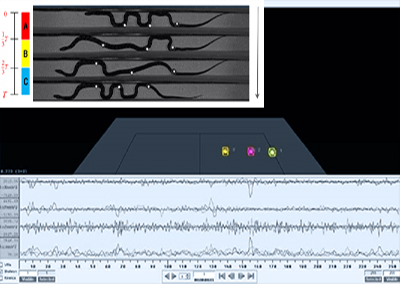
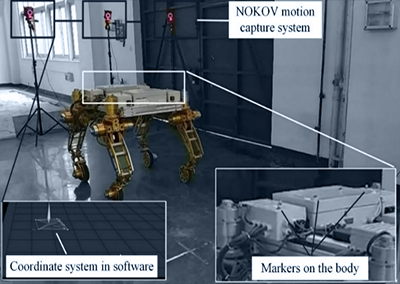
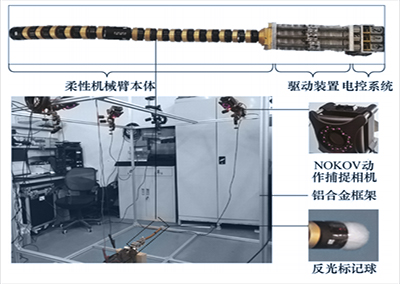
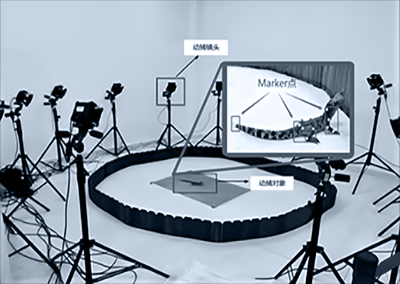
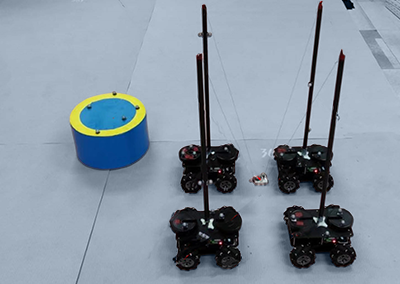
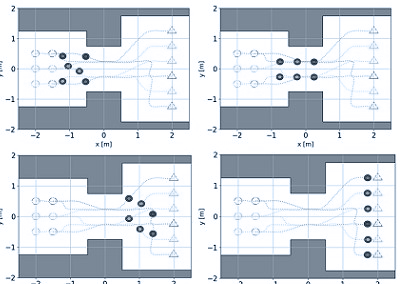
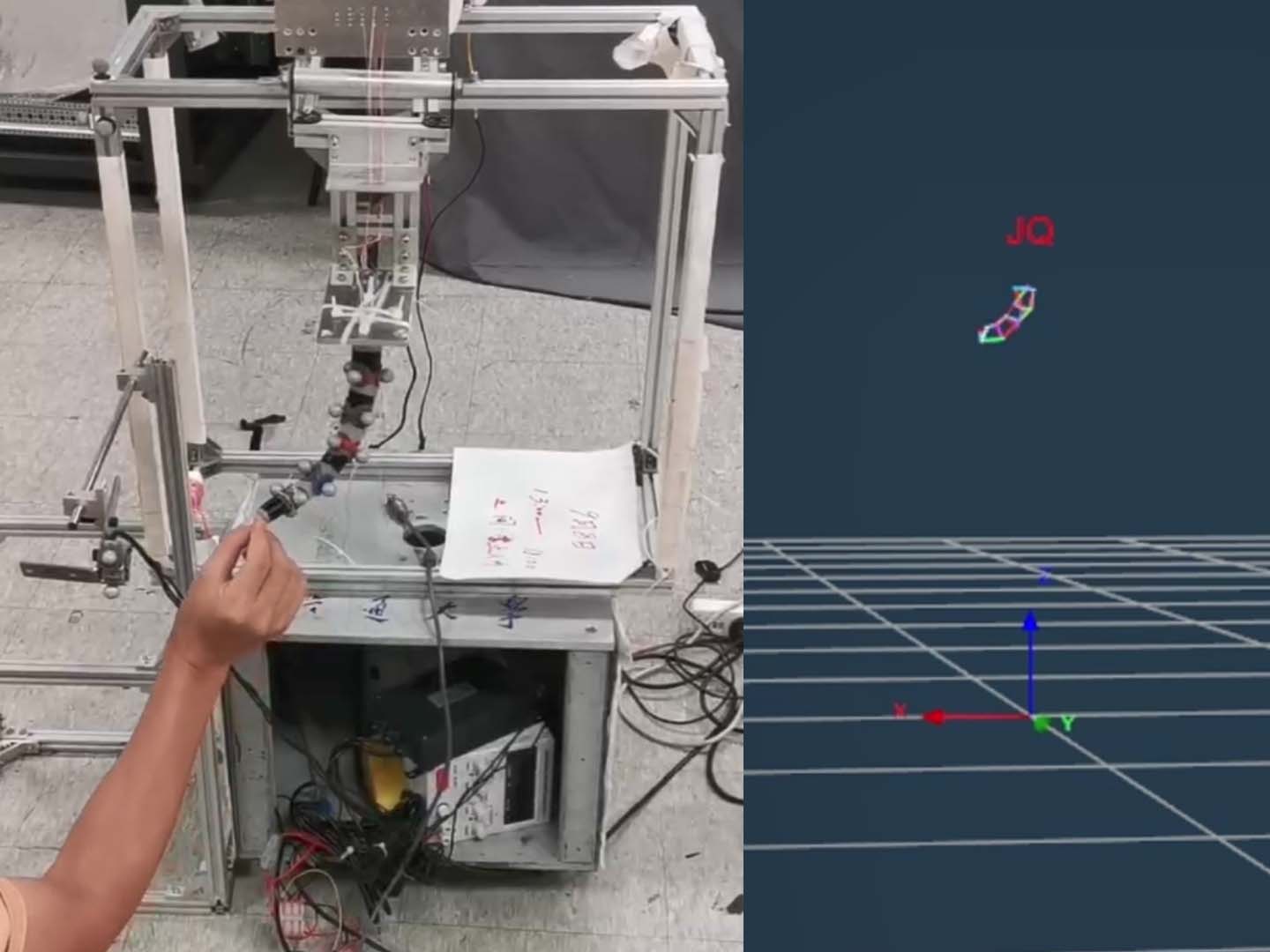
本文作者使用NOKOV度量动作捕捉系统,助力深度学习辅助仿海豹胡须传感器实现水下航行器的近场感知与在线状态评估。基于水下动作捕获系统捕获的航行器实时运动状态(速度、加速度),建立了航行器运动状态信息与仿海豹胡须传感器电信号的数据集。采用深度学习分析技术处理多通道信号,阐明了仿海豹胡须传感器与机器人运动状态的映射高阶映射机制,赋予水下航行器在线速度估计能力。所设计的仿海豹胡须摩擦电传感器(UTWS)可识别二维流场的多种特征,包括流速、攻角和尾流。这一研究成果不仅在技术上取得了重要突破,也为水下智能设备的导航定位提供了新的思路。
引用格式
Peng Xu, Jianhua Liu, Bo Liu, Yuanzheng Li, Hao Jin, Zhaoyang Mu, Tangzhen Guan, Guangming Xie, Hao Wang, Minyi Xu, Deep-learning-assisted triboelectric whisker for near field perception and online state estimation of underwater vehicle, Nano Energy, Volume 129, Part A, 2024, 110011, ISSN 2211-2855,
https://doi.org/10.1016/j.nanoen.2024.110011.
研究背景
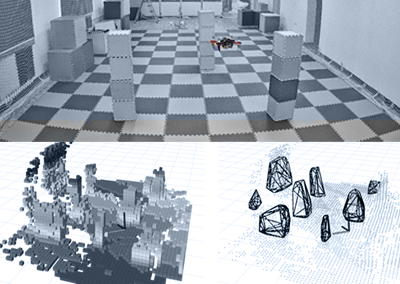
水下感知技术在水下目标探测和跟踪、水下航行器集群协作等多个领域发挥着至关重要的作用。水下同步感知主要涉及基于光学(激光)的技术和基于超声波(声纳)的技术。然而,激光和超声波技术在水下都会受到许多干扰因素的影响,导致感知范围和精度下降。此外,水下声纳作为主动传感手段,面临着能耗高、结构复杂、易暴露等挑战。因此,众多研究人员正致力于研究包括水动力感知在内的替代感知技术,以增强水下智能设备的感知能力。
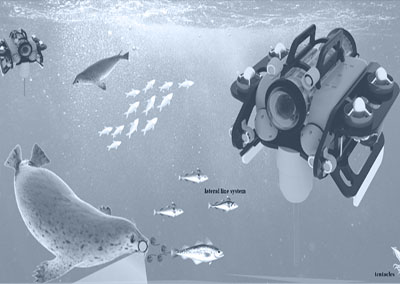
海洋生物的触觉器官能够准确测量和识别周围环境。受海洋生物感知行为的启发,研究人员设计了多种水下仿生触觉传感器。由此可见,水下仿生触觉传感具有巨大潜力,但触觉传感设备仍面临信噪比不足、灵敏度较低和适应性差等挑战。摩擦纳米发电机(Triboelectric nanogenerators, TENGs)作为一种创新的机电转换方法,其主要优势在于能够将广泛分布于环境中的混沌机械干扰直接转换为高振幅电信号。本研究设计了一种仿生水下摩擦电胡须传感器,可被动感知多种水动力流场,并利用深度学习模型进一步赋予水下航行器在线速度估计能力。
研究亮点
1.感知单元采用双层气室屏蔽技术,最大限度地减少水中离子的信号干扰。
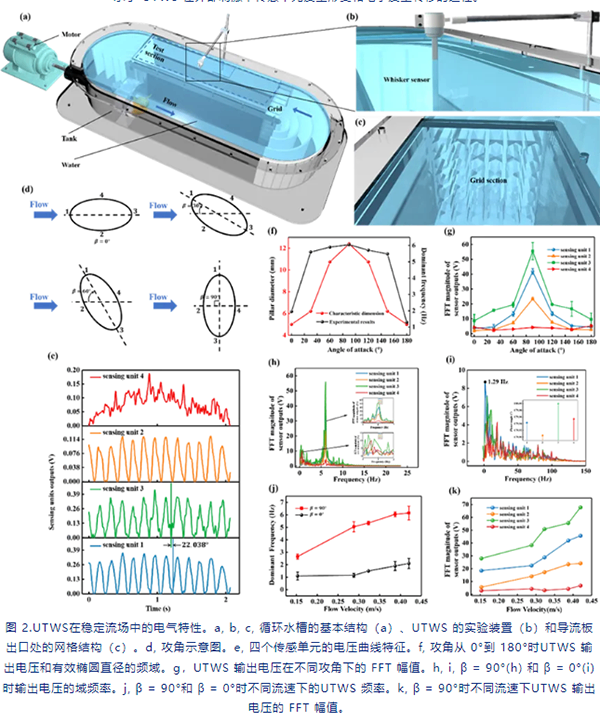
2.UTWS显示出令人印象深刻的优势,即21 ms的快速响应时间、3.16 V/m·s-¹的高灵敏度、61.66 dB的信噪比。
3.配备UTWS的水下航行器可以准确地完成在线速度估计,在验证情况下,近似均方根误差约为0.093。
测试实验
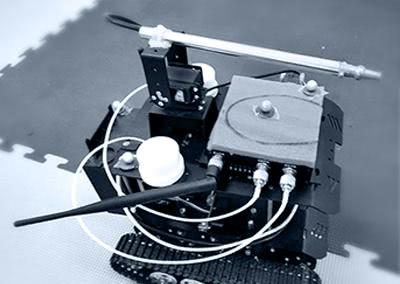
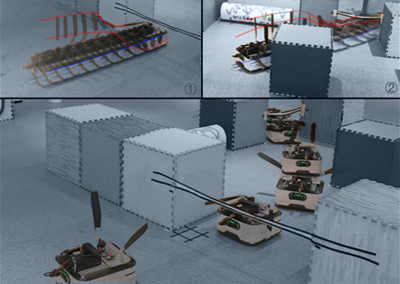
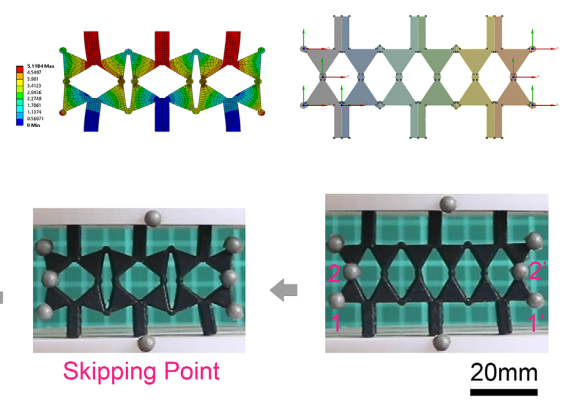
仿生水下摩擦电胡须传感器(UTWS)装置主要由一个高宽比为 0.403 的椭圆形须轴、四个仿生毛囊窦复合体神经的柔性摩擦电传感单元和一个仿生海洋生物脸颊表皮的柔性波纹接头组成。
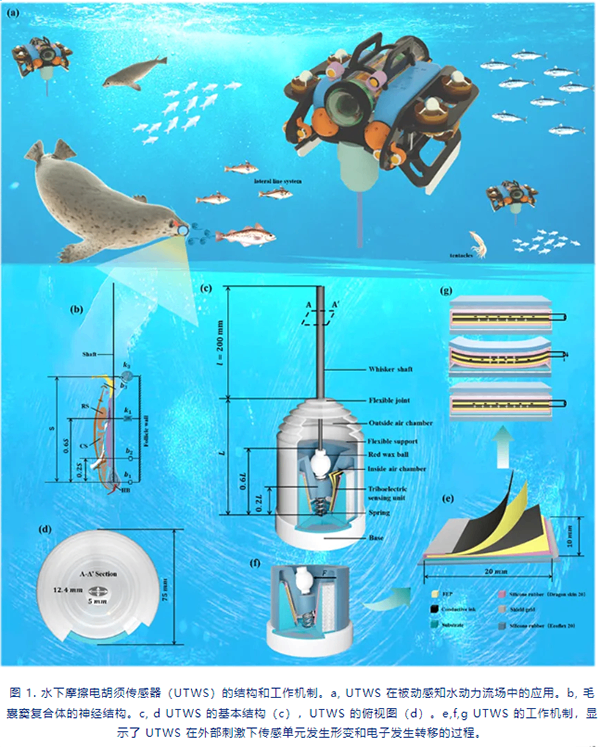
设计过程中采用双层气室屏蔽技术,最大限度地减少水中离子对信号的干扰。UTWS表现出了亮眼的优势:21ms的快速响应时间、61.66 dB的高信噪比。通过采用深度学习分析技术处理多通道信号,配备UTWS的水下航行器能够完成在线速度估计,在验证情况下的方根误差约为0.093。因此,这种基于UTWS的深度学习辅助感知技术有望成为水下航行器在本地导航任务中的整合工具。
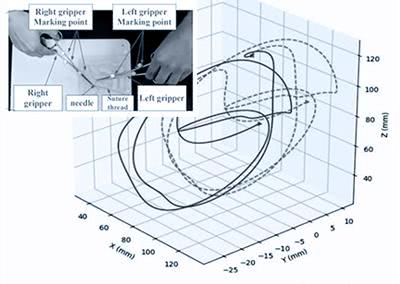
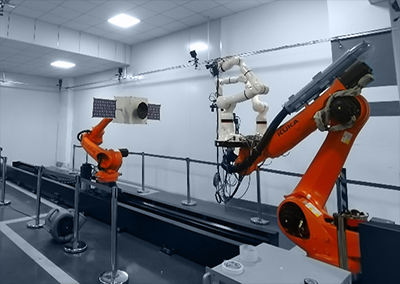
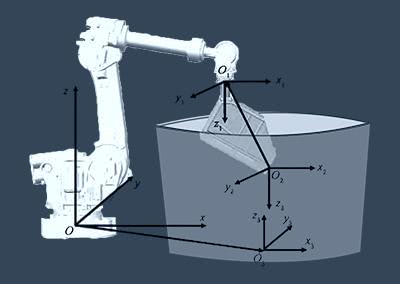
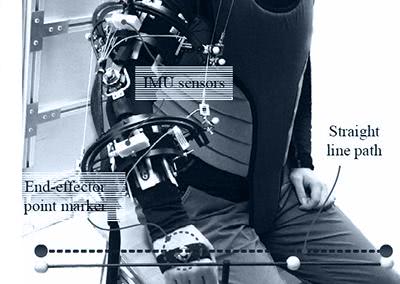
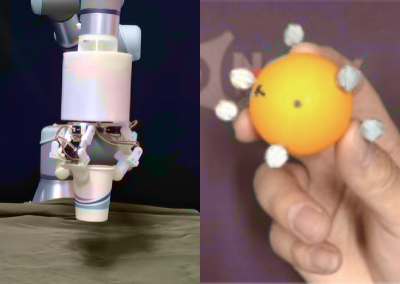
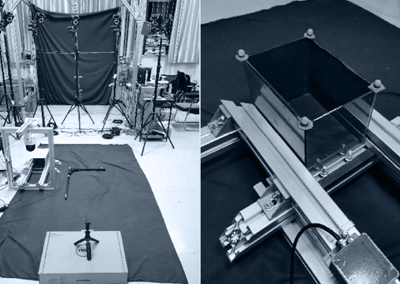
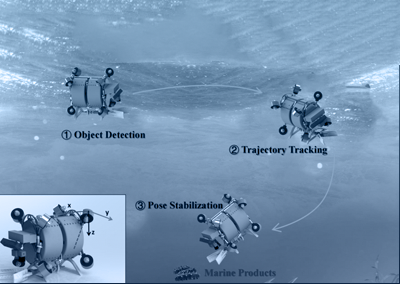
受港海豹灵敏的胡须启发,本研究设计了一种深度学习辅助的仿生水下摩擦电胡须传感器(UTWS),用于被动感知各种水动力流场和水下航行器的实时状态评估。NOKOV度量动作捕捉系统提供高精度的水下航行器位姿参考数据。
作者介绍
徐鹏,北京大学博士后研究员。主要研究方向:水下机器人、水下流场感知。
刘建华,大连海事大学轮机工程学院博士研究生。主要研究方向:水下仿生智能传感器,水下流场感知技术。
刘搏,大连海事大学轮机工程学院硕士研究生。主要研究方向:水下机器人智能感知技术,海洋能量捕获等。
李原正,大连海事大学轮机工程学院博士研究生。主要研究方向:水下接触式触觉传感技术。
金昊,大连海事大学轮机工程学院博士研究生。主要研究方向:机器人的智能感知与控制,机器视觉,多模态感知信息融合。
牟朝阳,大连海事大学轮机工程硕士研究生。主要研究方向:机器学习、人工智能技术的应用以及通过算法优化提高系统性能。
关堂镇,中国科学院理化技术研究所硕士研究生。主要研究方向:柔性机器人、液态金属人工肌肉、多功能自感知致动器。
谢广明(通讯作者),北京大学,先进制造与机器人系教授。主要研究方向:智能仿生机器人、机器人创新设计与应用、仿生集群协作、复杂系统动力学与控制等。
王昊(通讯作者),大连海事大学副教授。主要研究方向:海洋能捕获,水下流场感知。
徐敏义(通讯作者),大连海事大学教授。主要研究方向:水下机器人,水下新质感知,海洋能量捕获。





















































更多详情,请留言
-
您可致电010-64922321或在右侧留言,获取您专属的动作捕捉解决方案与报价单
-
- 领域 *
- 提交留言
