



同一真实空间中多人VR行走难以实现
虚拟现实,又称虚拟技术,它利用电脑模拟产生一个三维空间的虚拟世界, 用户可以即时地观察虚拟空间内的事物。用户进行位置移动时,电脑可以立即进行复杂的运算,将精确的虚拟世界视频传回产生临场感。沉浸式行走是其中一个重要的研究方向,即研究如何提高用户在虚拟现实系统中行走的真实感。
通常情况下,由于虚拟空间和现实空间的几何形状的不匹配,虽然虚拟空间范围很大,但是实际空间范围比较小,而且多名用户在同一空间时,存在互相碰撞的危险。之前的解决方法有通过联网使用户处于同一虚拟空间,但是用户实际上在不同房间中;或者是让多用户作为一个整体合作行动避免碰撞,实际上可以看作一个用户。实现在同一真实空间中的多用户行走的方法是行业研究的热点。
GCL针对行业难题提出重定向光滑映射方法
对于现实、虚拟空间不匹配的问题,目前主要有两种方法。第一种是重定向方法(RDW),基于视觉是调控人体运动的主要因素这一事实,在不引入用户察觉的前提下在虚拟空间和现实空间之间引入细微差别。但是此方法只能用于单用户。
第二种是光滑映射方法(SAM)。建立从虚拟场景到真实场景的映射。由于通常这个映射不是单位映射,映射后的虚拟场景会有较大扭曲。SMA方法通过建立有关衡量扭曲大小的能量函数以及有关的约束条件,利用最优化算法求解该优化问题,从而得到扭曲较小的从虚拟场景到现实场景的映射。该方法的优点是用户可以在场景中不中断地进行漫游,缺点是视觉扭曲严重降低用户的行走体验。
基于以上两种方法各自的优缺点,中科大刘利刚老师团队提出重定向光滑映射方法(REM),融合了重定向方法和光滑映射方法,利用重定向的方法辅助光滑映射生成更低扭曲、更直路线的映射。REM方法目标是建立一个映射 f :虚拟空间SV→真实空间SR,把SV中每个点(u,v)映射到SR中的(x,y)。首先把SV分解成k个区块,每个区块单独映射。然后把映射 f 分解成两个部分。首先,建立一个中间的预计算的工作空间 SP,并且计算一个中间映射 g : SV → SP。之后对 SP施加RDW,表示为 h : SP → SR。

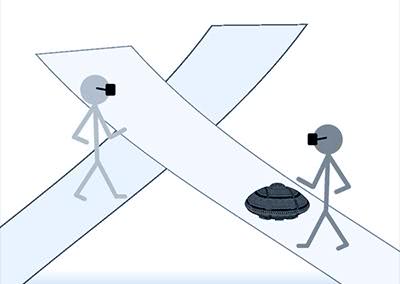
为了解决用户之间存在互相碰撞风险的问题,刘老师团队设计了一种利用“虚拟化身(avatars)“的方法。当两个用户有碰撞风险时,系统在其中一个用户的行走路线前方生成一个动态化身,作为指示物提示用户远离化身,进而避免用户间发生碰撞。
NOKOV提供多用户高精度定位解决方案
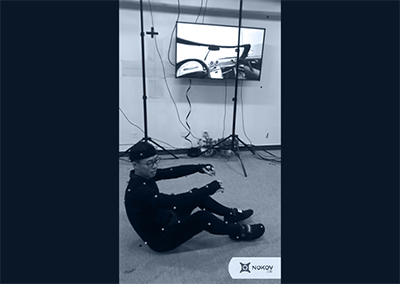
中科大的多用户虚拟空间行走&交互实验中使用了12个NOKOV Mars 2H红外光学动作捕捉相机(图中蓝色点),用来捕捉10m*10m(实际移动空间)的场地范围(虚拟移动空间大小为64m*33m)。房间中放置一根钢柱作为空间内部障碍物。使用者头上放置3个marker点,三个点的平均位置作为用户在三维空间中的位置。

用户在 SV 中的位置叫做虚拟位置,在 f(SV) 中的位置叫做真实位置(NOKOV红外光学动作捕捉相机获得(图中蓝色线),在 g(SV) 中的位置叫做重定向位置,用户相当于被 g(SV) 用RDW方法重定向到 f(SV)。在真实行走的过程中,NOKOV动作捕捉系统追踪到用户的真实位置 x,然后利用动态反向映射来得到虚拟位置 y =f^(-1)(x)。利用映射g把虚拟位置 y 映射到重定向位置 z = g(y) = g(f^(-1)(x)),也就是HMD头盔中所渲染的位置。

对于避免碰撞的“虚拟化身“算法,需要确定空间中两个用户的相对位置和重定向的位置。通过NOKOV动作捕捉设备定位到A、B两个用户在实际空间中的位置很接近,但是重定向的位置g(SV)距离很远,双方不能通过HMD看到对方。此时在用户B身边出现化身并且对B可见,B需要远离化身,以此避免与A发生碰撞。

除了中科大,NOKOV度量科技还与清华大学车辆与运载学院、中视典数字科技有限公司等多家国内高校及行业一流公司在虚拟现实方向开展深度合作。







更多详情,请留言
-
您可致电010-64922321或在右侧留言,获取您专属的动作捕捉解决方案与报价单
-
- 领域 *
- 提交留言
