




继成功发表Nature Communications后,来自北航的研究团队在机器人顶刊RA-L上发表题为“Mean-Shift Shape Formation of Multi-Robot Systems Without Target Assignment”的论文。
利用基于Mean-shift方法的分布式无分配算法,十个移动机器人在现实实验中依次形成“R”、“A”和“L”字母队形,并在NOKOV度量动作捕捉系统的助力下验证了算法在真实场景中的实用性。此外,不同群体规模下形成复杂队形的有效性,以及算法的精确度和高效性在仿真实验中得到验证。
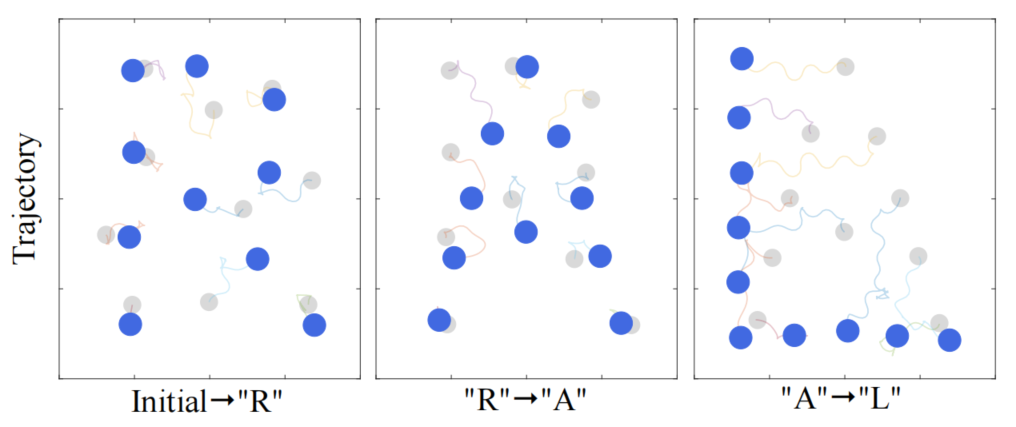
图1 现实实验 随机初始位置到依次形成“R”、“A”和“L”字母队形
研究背景
多智能体系统的队形控制通常分为目标分配和无碰撞运动两个子问题。目标分配策略分为预分配和动态分配方法,前者可能会降低避撞灵活性,增加路径规划计算的复杂度;后者可能面临计算成本高和潜在冲突问题。无分配方法消除了目标分配的过程,但难以形成具有精确目标位置的队形。因此,实现精确的、无分配的队形控制成为研究重点。
本文提出了一种基于Mean-shift方法的分布式无分配算法来实现精确、高效的队形控制,并利用仿真和现实实验验证了算法的高效性和实用性。
实验结果
1)仿真实验:
A. 本文算法应对复杂目标队形形状和不同群体规模的有效性
本文所提出的队形控制算法可以引导200个机器人在小于30s的时间内形成复杂期望队形;当机器人群体规模从50增加至350,“DNA”队形收敛时间从10s增加至60s。群体规模的增大并没有导致收敛时间显著增加。以上仿真实验结果证明了算法在形成复杂队形形状时的有效性。
B. 本文算法与目标分配算法和基于Mean-shift的算法对比
基于Mean-shift的算法无法实现精确目标队形控制;而目标分配算法的收敛时间是本文算法的8倍以上。该仿真实验验证了本文算法在队形控制精确度和效率上的优势。
2)现实验证实验:
图2 现实实验系统配置和实验结果
该实验平台配备了NOKOV度量光学三维动作捕捉系统,用于获取机器人的实时位置和航向角。并使用PC来接收机器人的状态数据、提取实时状态。实验在PC(MATLAB/Simulink)机上通过分布式并行机制来计算控制命令,从而实现所提出的算法。最后,通过无线路由器将计算得到的控制指令以10Hz的频率发送给机器人。
10个机器人在一个大小为 4m*5m 的实验平台内移动,从某一初始位置开始依次形成了字母队形形状“R”、“A”和“L”。如图2(d)所示,每个字母队形的收敛时间不超过40秒,验证了本文算法在真实场景中的实用性。
参考文献:
Y. Zhang, R. Zhou, X. Li and G. Sun, "Mean-Shift Shape Formation of Multi-Robot Systems Without Target Assignment," in IEEE Robotics and Automation Letters, vol. 9, no. 2, pp. 1772-1779, Feb. 2024, doi: 10.1109/LRA.2024.3349926.
原文链接:https://ieeexplore.ieee.org/document/10380669
更多详情,请留言
-
您可致电010-64922321或在右侧留言,获取您专属的动作捕捉解决方案与报价单
-
- 领域 *
- 提交留言