



近日,重庆邮电大学生物医学工程研究中心王伟教授团队在SCI收录期刊SENSORS上发表题为“Effects of Dynamic IMU-to-Segment Misalignment Error on 3-DOF KneeAngle Estimation in Walking and Running”的论文,提出了一种用于惯性测量单元(IMU)与肢体节段动态对齐的新算法。

论文检索页面
研究背景
人体动作捕捉技术在康复、竞技体育、人机交互、身份识别等领域发挥着重要的作用。在各种应用场景中,获得更加精确的关节角是一项重要的评判标准。
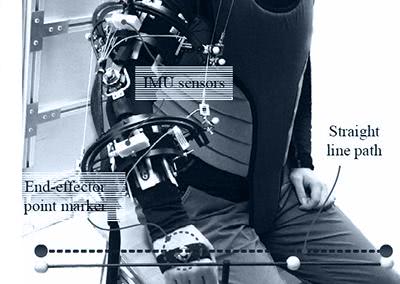
使用惯性测量单元(IMU)获取肢体姿态数据,惯涉及全局坐标系、传感器坐标系与肢体坐标系之间的转换,其中IMU坐标系与肢体坐标系的对齐(IMU-to-Segment,I2S)决定着传感器输出数据是否能够代表所附着肢体的运动,是人体关节角解算的重要环节。
目前IMU与肢体对齐的方法主要分为人工对齐、预动作对齐、额外数据融合以及运动模型对齐等类型。其中基于运动模型的动态对齐方法无需专业人员以及额外设备,并且能够消除运动过程中的误差。

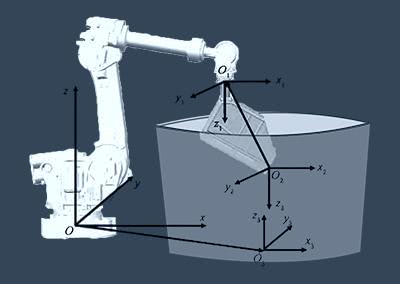
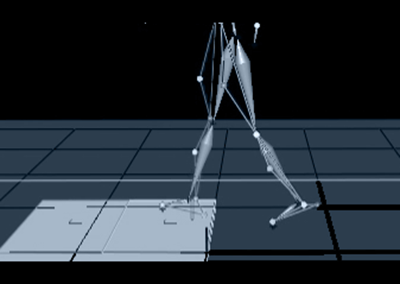
IMU与肢体坐标对齐示意图
研究内容
研究团队基于运动约束模型,引入了带交叉因子的DPSO算法完成动态对齐过程,利用动态对齐参数,完成了基于四元数的三自由度人体关节角度解算。
进一步的,通过人为添加误差,研究了人体在行走(3km/h)、慢跑(6km/h)以及正常跑步(9km/h)过程中,IMU与肢体错位误差对关节角解算带来的影响,以及各种影响背后的人体运动学差异。
算法验证
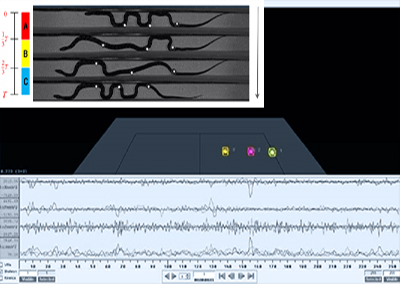
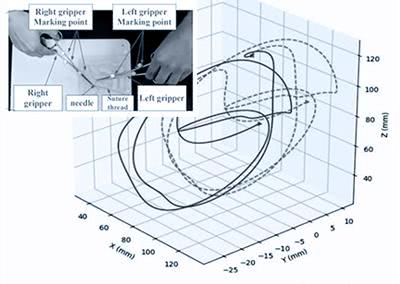
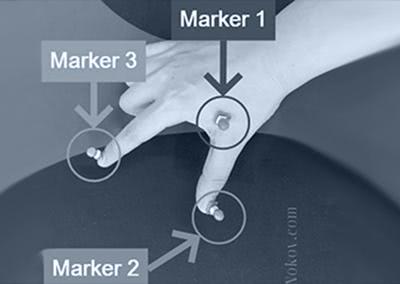
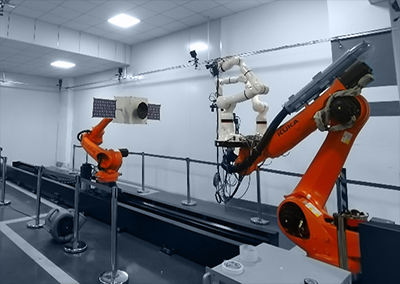
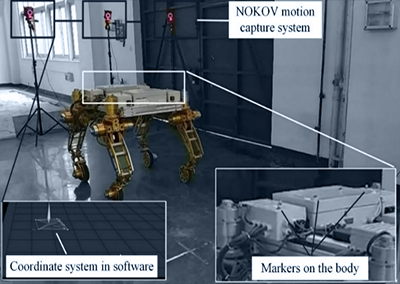
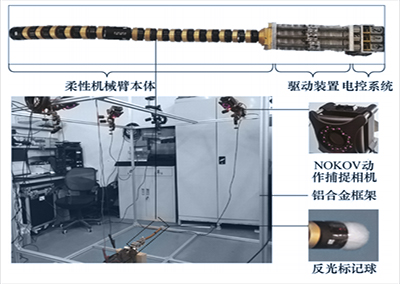
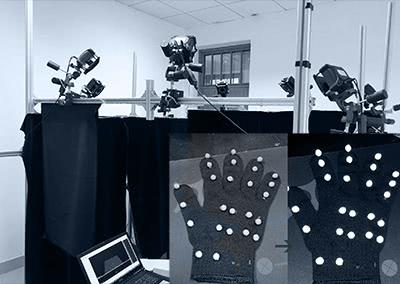
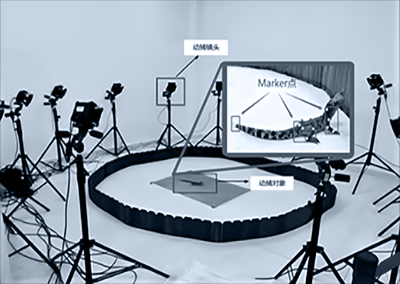
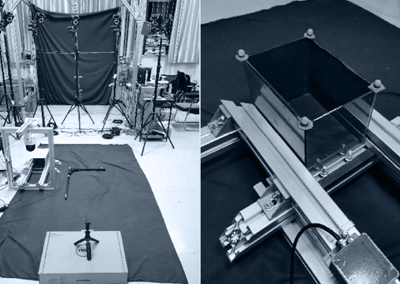
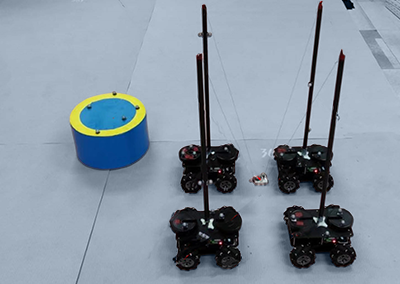
为了验证关节解算算法的效果,研究团队使用NOKOV度量亚毫米级光学动作捕捉系统,获取真实的肢体姿态信息。部署光学动作捕捉镜头,在被试者双腿的大腿和小腿上设置三个非共面的marker来定义附着的刚体,通过NOKOV度量动作捕捉软件输出每个肢体节段的旋转姿态数据,进一步计算出基于光学动作捕捉设备的三自由度关节角,作为真实值,与基于IMU的关节角进行对比。

使用NOKOV度量动作捕捉系统获取真实的肢体姿态信息
结果表明,在三种运动场景下,关节角的均方根误差(RMSE)在1.2-5.2°之间,关节角解算算法效果良好,不同运动中的IMU与肢体间的错位误差也印证了相关的人体运动学差异。














































更多详情,请留言
-
您可致电010-64922321或在右侧留言,获取您专属的动作捕捉解决方案与报价单
-
- 领域 *
- 提交留言
